

Question: 1 c ) Implement a discrete - time Simple Car kinematic model Section 1 3 . 1 . 2 of Lavelle's book provides a good
c Implement a discretetime Simple Car kinematic model
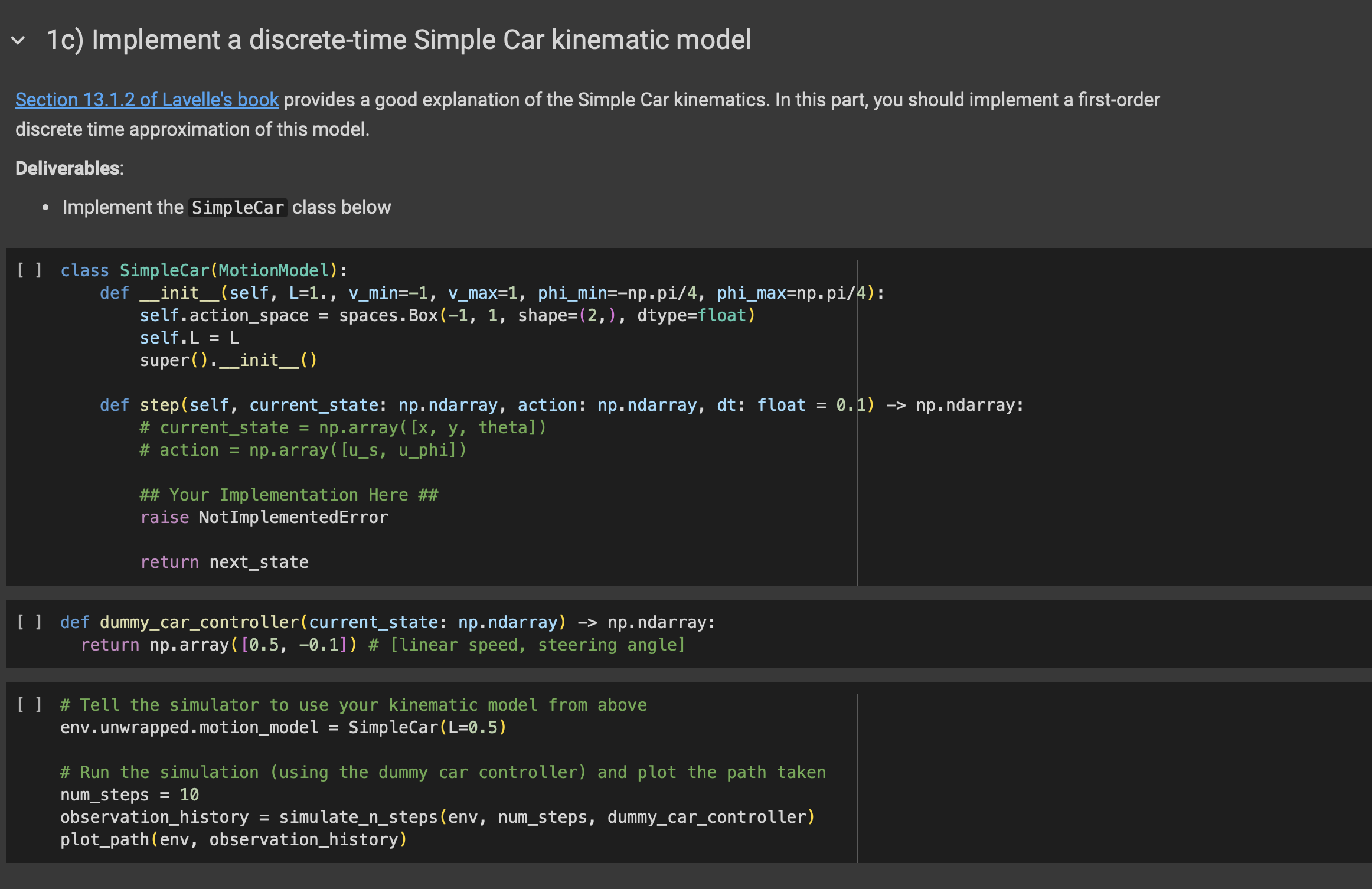
Section of Lavelle's book provides a good explanation of the Simple Car kinematics. In this part, you should implement a firstorder
discrete time approximation of this model.
Deliverables:
Implement the SimpleCar class below
class SimpleCarMotionModel:
def self L vmin vmax phiminnppi phimaxnppi :
self.actionspace spaces. shape
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock