

Question: 1 (Camera Models- 30 points) Prove that the vector from the viewpoint of a pinhole camera to the vanishing point (in the image plane) of
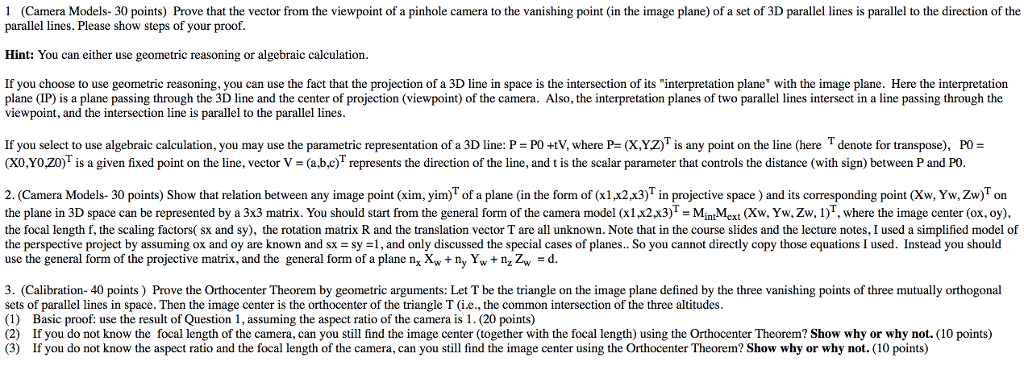
1 (Camera Models- 30 points) Prove that the vector from the viewpoint of a pinhole camera to the vanishing point (in the image plane) of a set of 3D parallel lines is parallel to the direction of the parallel lines. Please show steps of your proof Hint: You can either use geometric reasoning or algebraic calculation. If you choose to use geometric reasoning, you can use the fact that the projection of a 3D line in space is the intersection of its "interpretation plane' with the image plane. Here the interpretation plane (IP) is a plane passing through the 3D line and the center of projection (viewpoint) of the camera. Also, the interpretation planes of two parallel lines intersect in a line passing through the viewpoint, and the intersection line is parallel to the parallel lines If you select to use a gebraic calculation, you may use the parametric representation of a 3D line: P = P HV where P= X,Y T is any pont on the line here denote for transpose P0 = (Xo.yoZo)T is a given fixed point on the line, vector V- (a,b,c)T represents the direction of the line, and t is the scalar parameter that controls the distance (with sign) between P and PO 2. (Camera Models-30 points) Show that relation between any image point (xim, yim)T of a plane (in the form of (x1.x2.x3)T in projective space) and its corresponding point (Xw, Yw, Zw)T on the plane in 3D space can be represented by a 3x3 matrix. You should start from the general form of the camera model (x1x2x3)TMinMexXw, Yw. Zw, 1)T, where the image center (ox, oy) the focal length f the scaling factors sx and sy , the rotation matrix R and the translation vector T are all unknown. Note that in the course slides and the lecture notes, I used a simplified model of the perspective project by assuming ox and oy are known and sx = sy =1 and only discussed the special cases of planes. So you cannot directly copy those equations I used. Instead you should use the general form of the projective matrix, and the general form of a plane nx Xmt ny Yut nz Zw = d. 3. (Calibration- 40 points) Prove the Orthocenter Theorem by geometric arguments: Let T be the triangle on the image plane defined by the three vanishing points of three mutually orthogonal sets of parallel lines in space. Then the image center is the orthocenter of the triangle T (i.e., the common intersection of the three altitudes (1) Basic proof: use the result of Question 1, assuming the aspect ratio of the camera is 1. (20 points) (2) Ifyou do not know the focal length of the camera, can you still find the image center (together with the focal length) using the Orthocenter Theorem? Show why or why not. (10 points) (3) If you do not know the aspect ratio and the focal length of the camera, can you still find the image center using the Orthocenter Theorem? Show why or why not. (10 points)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts