

Question: 1. Consider that a Mamdani's FLC will be developed using triangular membership function distribution for solving a robot navigation problem. The inputs are 'Distance' (D)
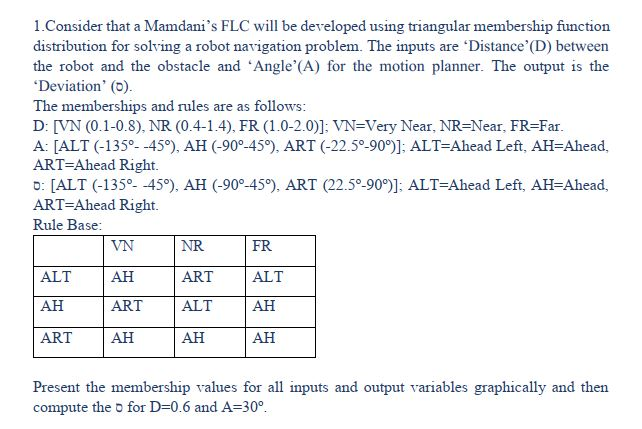
1. Consider that a Mamdani's FLC will be developed using triangular membership function distribution for solving a robot navigation problem. The inputs are 'Distance' (D) between the robot and the obstacle and 'Angle' (A) for the motion planner. The output is the *Deviation' (o). The memberships and rules are as follows: D: [VN 0.1-0.8), NR (0.4-1.4), FR (1.0-2.0)]; VN=Very Near, NR=Near, FR=Far. A: [ALT (-1350- 459), AH(-90-45), ART (-22.50-90%)]; ALT=Ahead Left, AH=Ahead, ART=Ahead Right. D: SALT (-135 -459), AH (-90-459), ART (22.5-90]: ALT=Ahead Left, AH=Ahead, ART=Ahead Right. Rule Base: VN NR FR ALT AH ART ALT AH ART ALT AH ART AH AH AH Present the membership values for all inputs and output variables graphically and then compute the o for D=0.6 and A=30. 1. Consider that a Mamdani's FLC will be developed using triangular membership function distribution for solving a robot navigation problem. The inputs are 'Distance' (D) between the robot and the obstacle and 'Angle' (A) for the motion planner. The output is the *Deviation' (o). The memberships and rules are as follows: D: [VN 0.1-0.8), NR (0.4-1.4), FR (1.0-2.0)]; VN=Very Near, NR=Near, FR=Far. A: [ALT (-1350- 459), AH(-90-45), ART (-22.50-90%)]; ALT=Ahead Left, AH=Ahead, ART=Ahead Right. D: SALT (-135 -459), AH (-90-459), ART (22.5-90]: ALT=Ahead Left, AH=Ahead, ART=Ahead Right. Rule Base: VN NR FR ALT AH ART ALT AH ART ALT AH ART AH AH AH Present the membership values for all inputs and output variables graphically and then compute the o for D=0.6 and A=30
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts