

Question: 1. Consider the following transfer function, which represents G from Fig. 11.9 Part A: If one were to use the IMC method for designing/tuning a
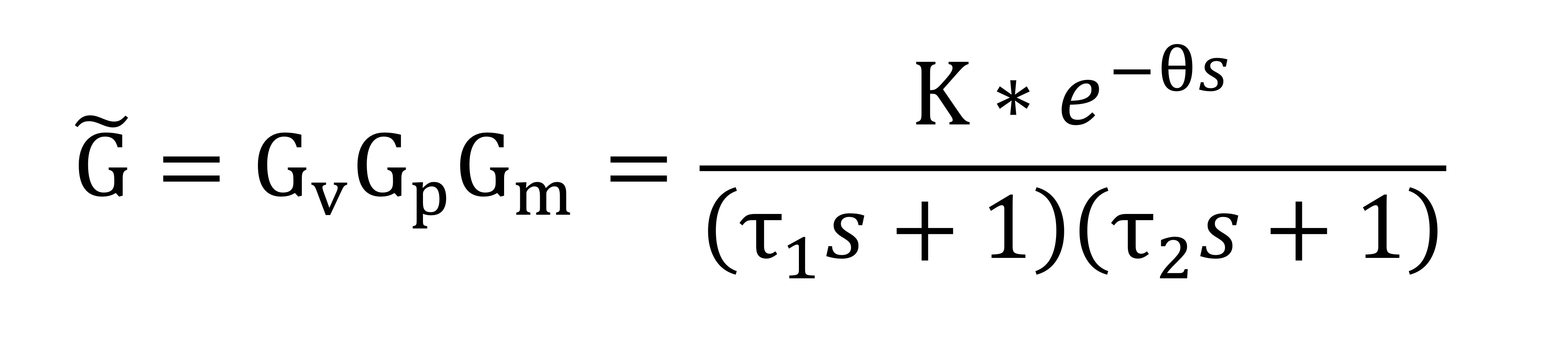
1. Consider the following transfer function, which represents G from Fig. 11.9
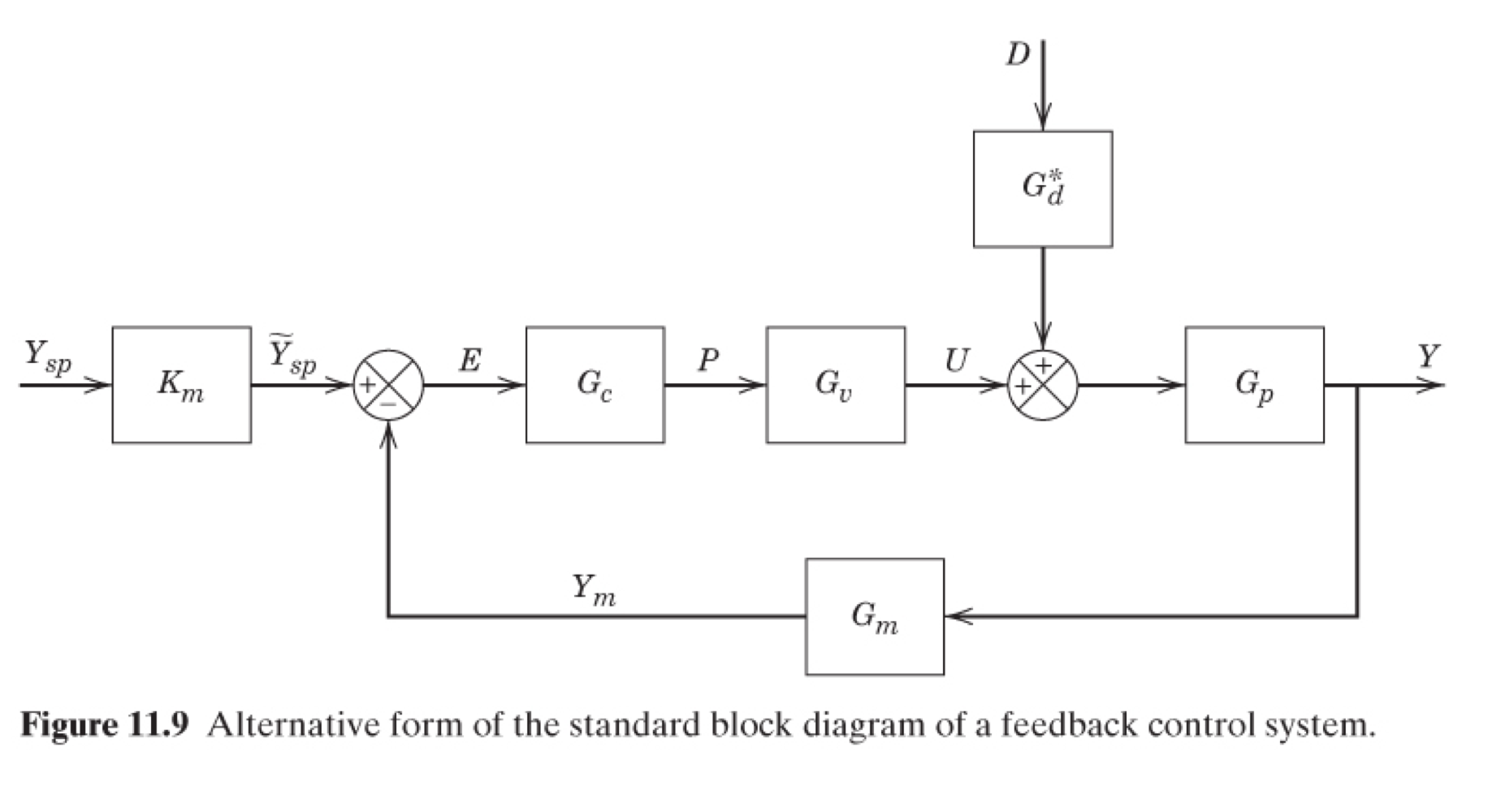
Part A: If one were to use the IMC method for designing/tuning a controller, what value of c would be considered "default" (i.e., performance that is neither particularly aggressive nor particularly robust)? Your answer can be left relative to ''
Part B: Design a PID controller for the servo problem using the IMC method if we know the following values: K=10, = 0.1s,1 = 5s,2 =3 s.You may use your value of c from part a.
Part C: The reduced form of G (to a first-order T.F.) is shown below. Based on this new T.F., tune a PID controller using the AMIGO method.
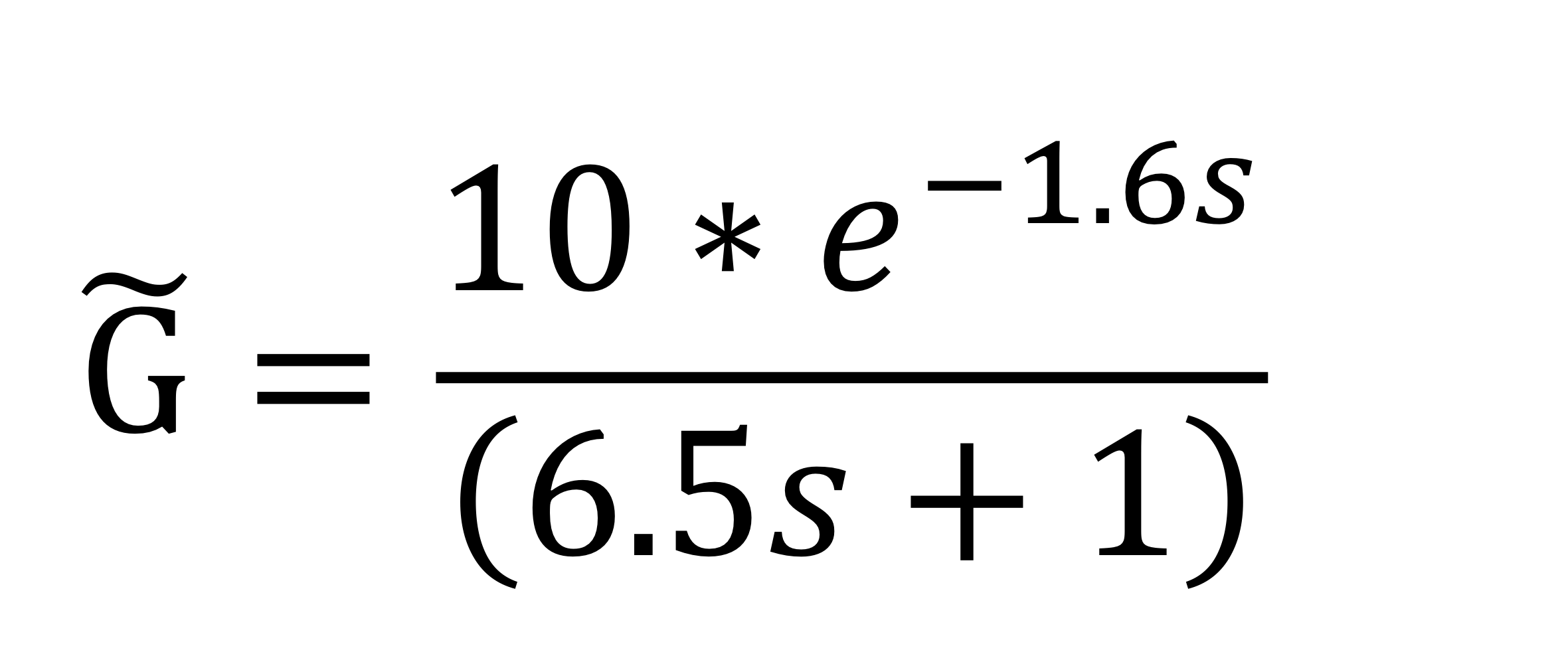
D GM Ygp Y sp E U Y Km GC GU + Gp Ym Gm Figure 11.9 Alternative form of the standard block diagram of a feedback control system. K* e-os = GyGpGm = (Tis + 1)(T25 + 1) 10 *e-1.65 G = (6.5s + 1) D GM Ygp Y sp E U Y Km GC GU + Gp Ym Gm Figure 11.9 Alternative form of the standard block diagram of a feedback control system. K* e-os = GyGpGm = (Tis + 1)(T25 + 1) 10 *e-1.65 G = (6.5s + 1)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts