

Question: 1. For the robot shown in Fig. 1: (a) Set up coordinate systems of all joints based on the procedure you observed in the class,
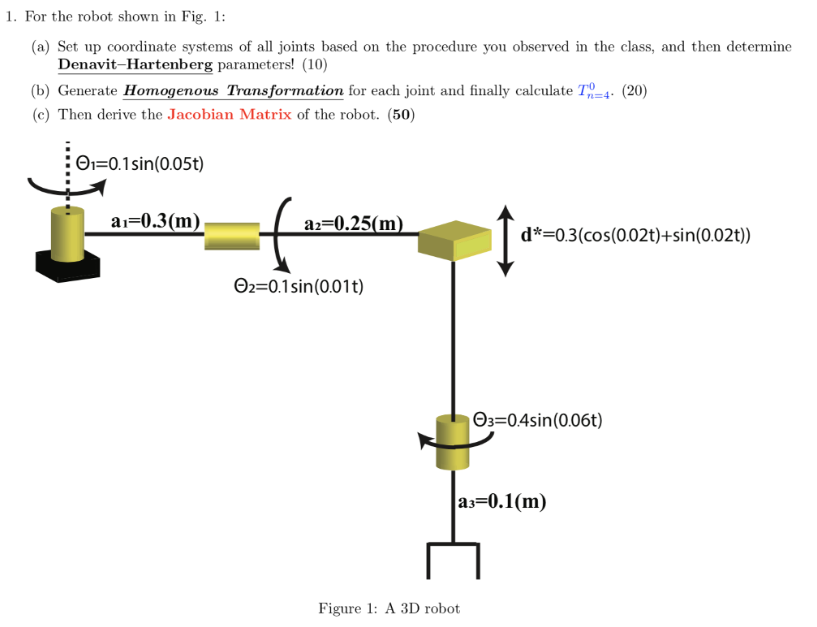
1. For the robot shown in Fig. 1: (a) Set up coordinate systems of all joints based on the procedure you observed in the class, and then determine Denavit-Hartenberg parameters! (10) (b) Generate Homogenous Transformation for each joint and finally calculate T4 (20) (c) Then derive the Jacobian Matrix of the robot. 50) O1-0.1sin(0.05t) ai-0.3(m) 2 0.25(m d*-0.3(cos(0.02t)+sin(0.02t) 02-0.1sin(0.01t) 03-04sin(0.06t) as-0.1 (m) Figure 1: A 3D robot
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock