

Question: 1. joints Using Denavit-Hartenberg convention, set up A matrices for the manipulator for the first three 0 Link Variable 1 0 2 d2 -90
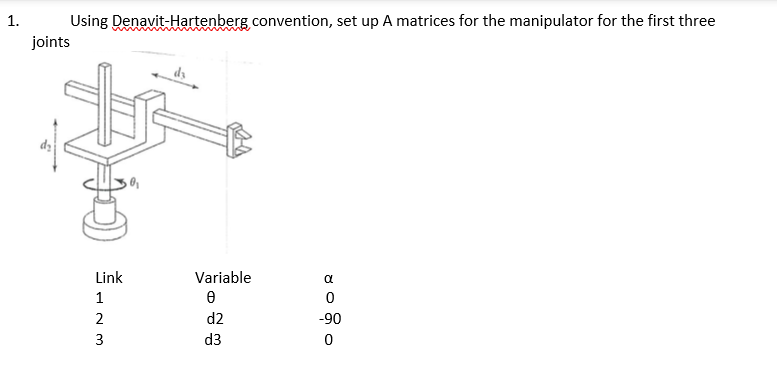
1. joints Using Denavit-Hartenberg convention, set up A matrices for the manipulator for the first three 0 Link Variable 1 0 2 d2 -90 3 d3 0
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock