

Question: 1) Let us consider the following value of parameters to simulate the quadcopter motion in MATLAB while using the in-built command ODE45 to solve
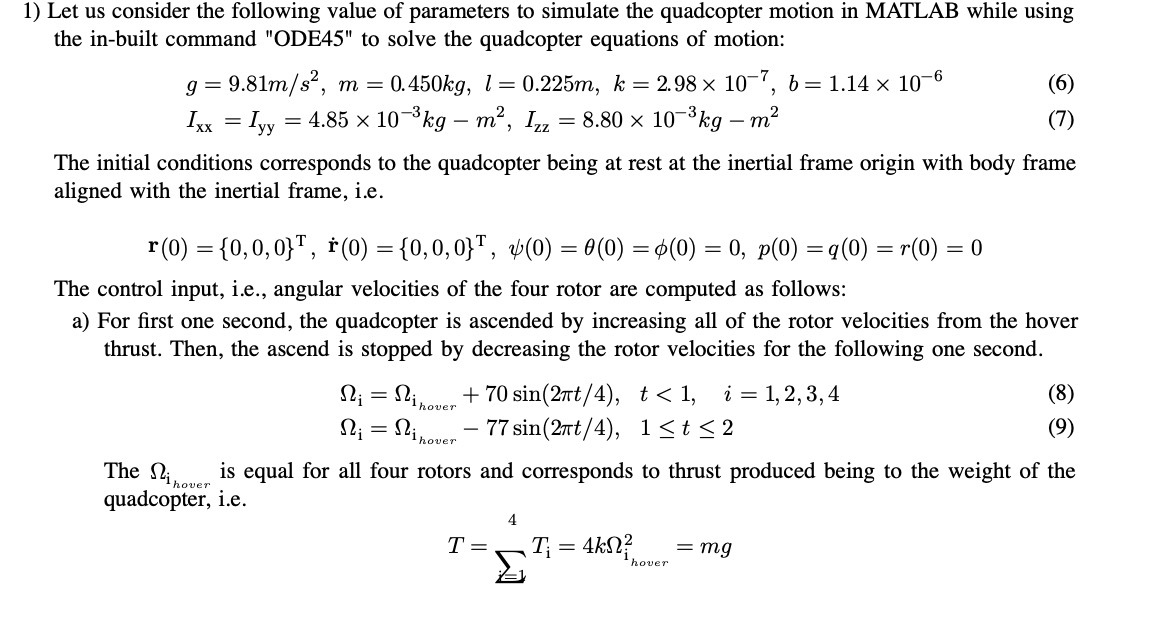
1) Let us consider the following value of parameters to simulate the quadcopter motion in MATLAB while using the in-built command "ODE45" to solve the quadcopter equations of motion: g= 9.81m/s, m = 0.450kg, 1 = 0.225m, k = 2.98 107, 6 = 1.14 10-6 Ixx = Iyy = 4.85 103 kg - m, Izz = 8.80 103 kg 2 -m (6) (7) The initial conditions corresponds to the quadcopter being at rest at the inertial frame origin with body frame aligned with the inertial frame, i.e. = =r(0) = = 0 r(0) = {0,0,0}, (0) = {0,0,0}T, &(0) = 0 (0) = (0) = 0, p(0) = q(0): The control input, i.e., angular velocities of the four rotor are computed as follows: a) For first one second, the quadcopter is ascended by increasing all of the rotor velocities from the hover thrust. Then, the ascend is stopped by decreasing the rotor velocities for the following one second. Si = i hover Si = i hover +70 sin(2t/4), t
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts