

Question: 1. Methodology - Screen Shot your model and steps, also describe a little 2. Results & Discussion - Compare the performance of the controllers Briefly
1. Methodology - Screen Shot your model and steps, also describe a little 2. Results & Discussion - Compare the performance of the controllers
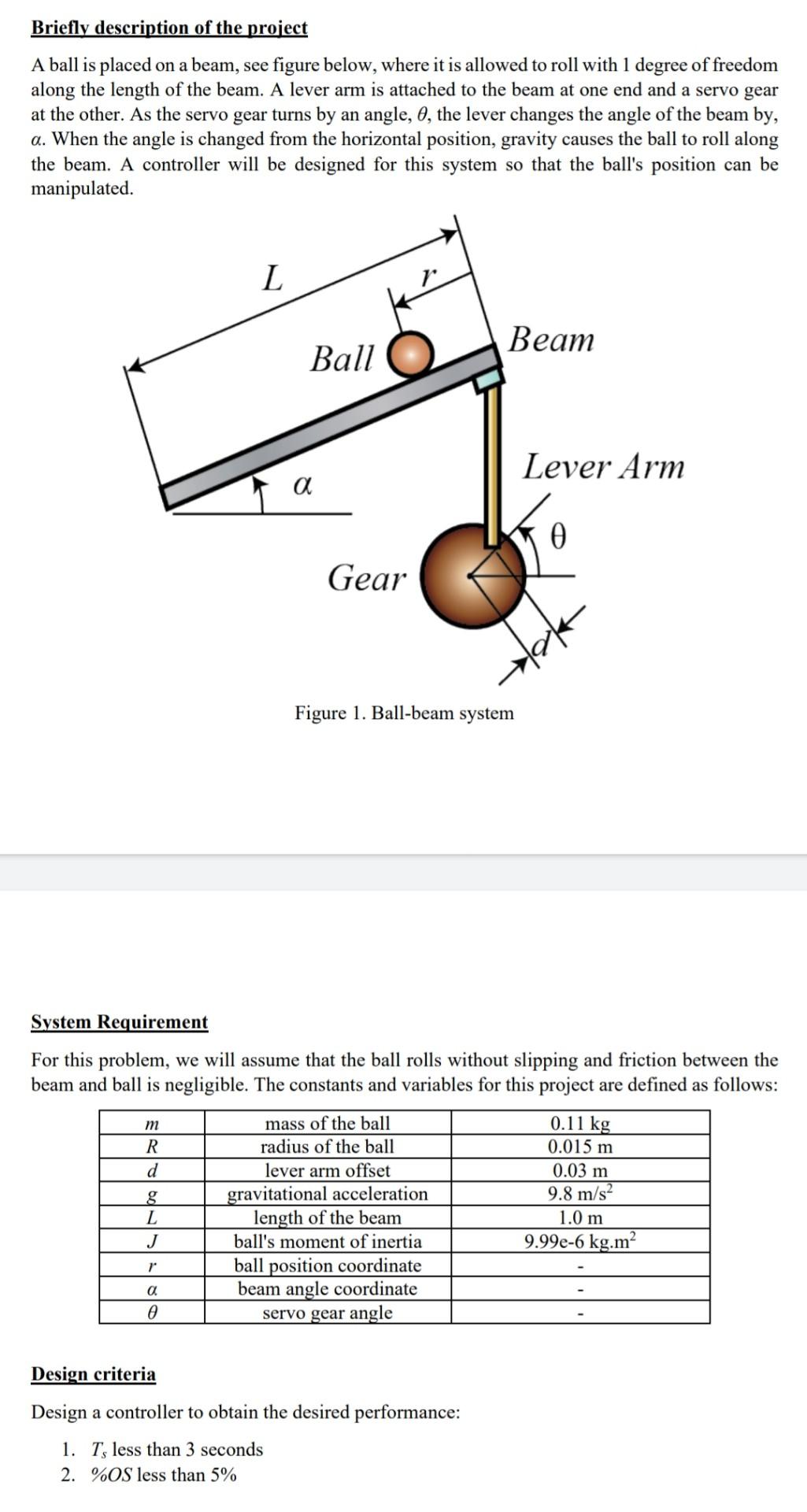
Briefly description of the project A ball is placed on a beam, see figure below, where it is allowed to roll with 1 degree of freedom along the length of the beam. A lever arm is attached to the beam at one end and a servo gear at the other. As the servo gear turns by an angle, 0, the lever changes the angle of the beam by, a. When the angle is changed from the horizontal position, gravity causes the ball to roll along the beam. A controller will be designed for this system so that the ball's position can be manipulated. L Beam Ball Lever Arm a 0 Gear Figure 1. Ball-beam system System Requirement m For this problem, we will assume that the ball rolls without slipping and friction between the beam and ball is negligible. The constants and variables for this project are defined as follows: mass of the ball 0.11 kg R radius of the ball 0.015 m d lever arm offset 0.03 m g gravitational acceleration 9.8 m/s L length of the beam 1.0 m J ball's moment of inertia 9.99e-6 kg.m? ball position coordinate beam angle coordinate servo gear angle r a Design criteria Design a controller to obtain the desired performance: 1. Ts less than 3 seconds 2. %OS less than 5%
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts