

Question: 1 . Resource Access Control Consider a robot control system having the following four serially reusable resources: Link: Used for receiving commands from the user
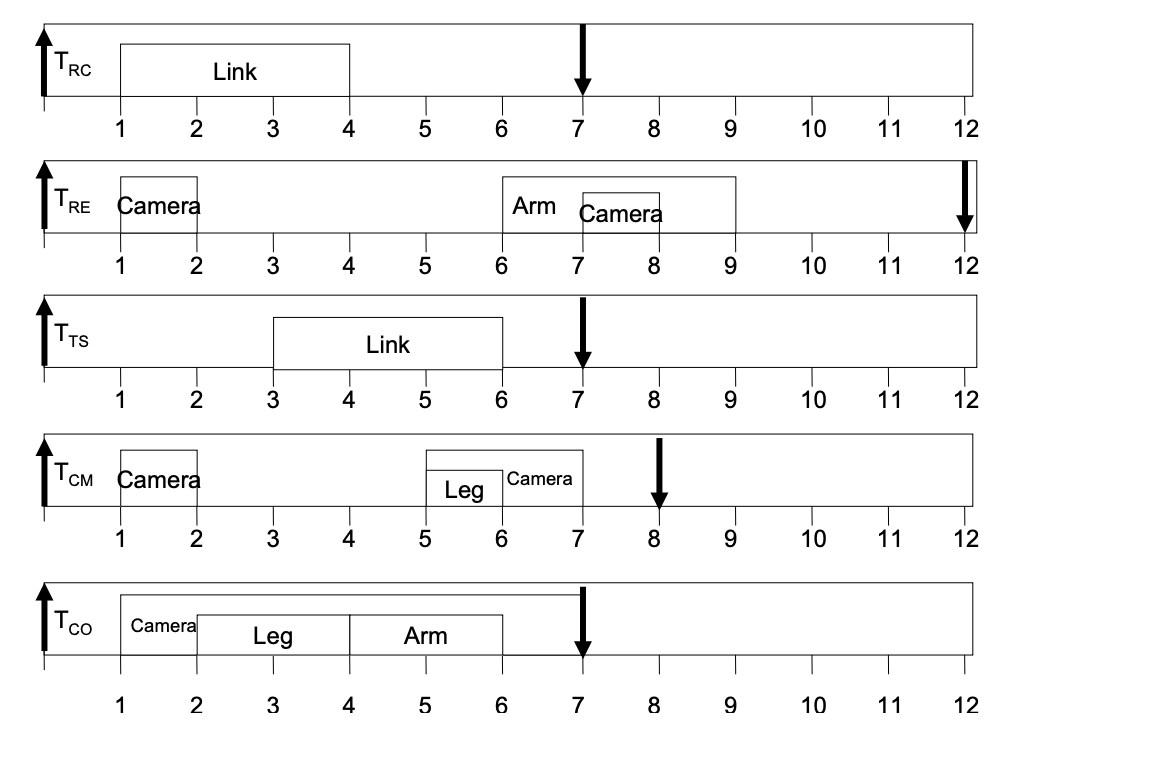
Resource Access Control Consider a robot control system having the following four serially reusable resources: Link: Used for receiving commands from the user and for transmitting environmental and status information and other data to the user. Legs: Used for moving and turning. Arms: Used for holding things. Camera: Used for vision. The control system has the following tasks listed in the order of decreasing priority: Receive command task, TRC: p D e with LLink at t ULink at t
Record event task, TRE: p D e with LCamera at t UCamera at t LArm at t LCamera at t UCamera at t UArm at t
Transmit status task, TTS: p D e with LLink at t ULink at t
Control motion task, TCM: p D e with LCamera at t UCamera at t LCamera at t LLeg at t ULeg at t UCamera at t
Clear obstacle task, TCO: p D e with LCamera at t LLeg at t ULeg at t LArm at t UArm at t UCamera at t
The execution and resource access profiles of these tasks are also shown in the following figure:
Assuming the basic priority ceiling protocol, what is the maximum possible blocking time for each task?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock