

Question: 1 Serial robot displacement analysis 1. For the RRP serial robot in the figure: Figure 1: RRP Robot. (a) Solve the forward displacement analysis
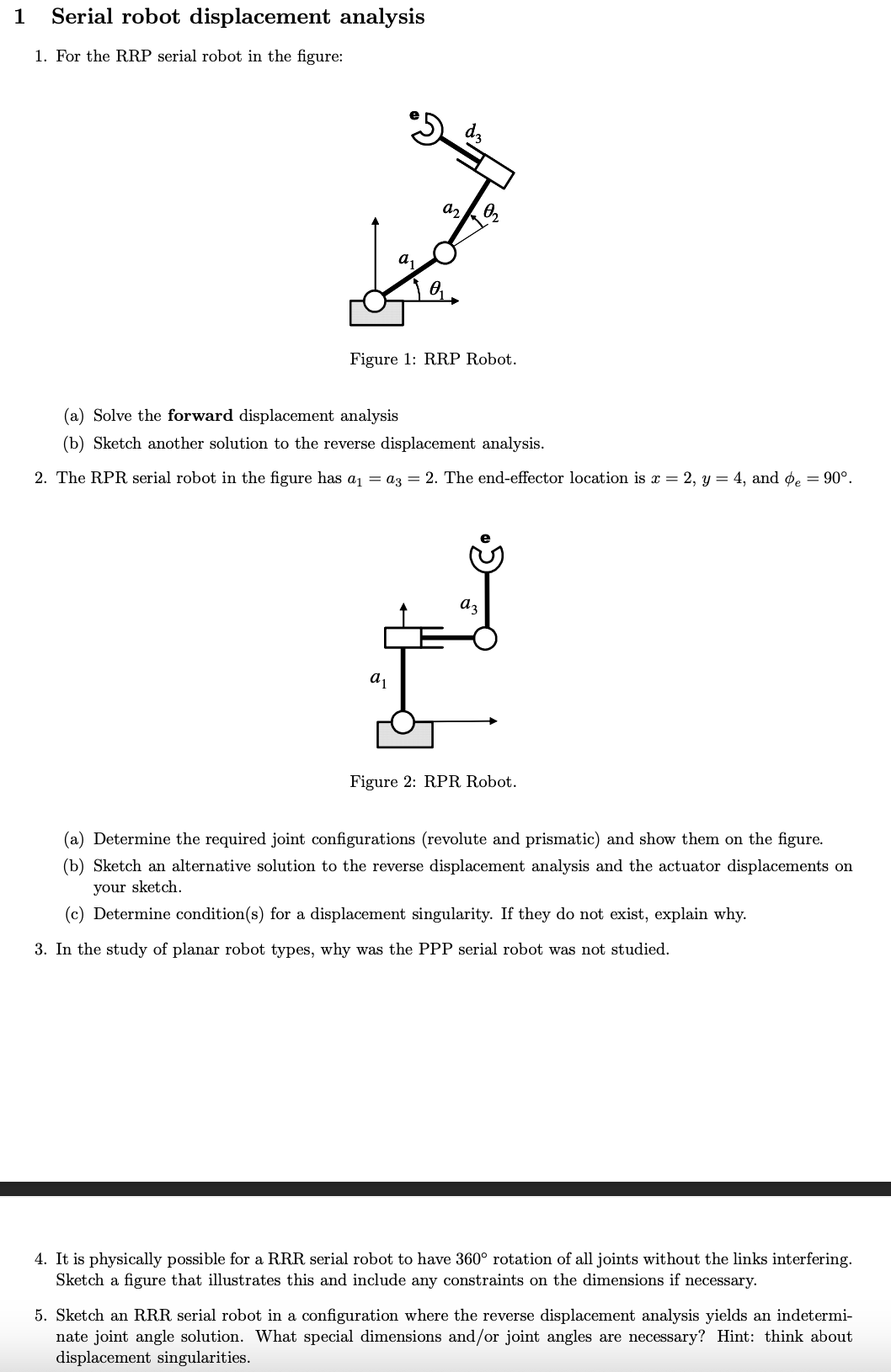
1 Serial robot displacement analysis 1. For the RRP serial robot in the figure: Figure 1: RRP Robot. (a) Solve the forward displacement analysis (b) Sketch another solution to the reverse displacement analysis. 2. The RPR serial robot in the figure has a = a3 = 2. The end-effector location is x = 2, y = 4, and be = 90. a Figure 2: RPR Robot. (a) Determine the required joint configurations (revolute and prismatic) and show them on the figure. (b) Sketch an alternative solution to the reverse displacement analysis and the actuator displacements on your sketch. (c) Determine condition(s) for a displacement singularity. If they do not exist, explain why. 3. In the study of planar robot types, why was the PPP serial robot was not studied. 4. It is physically possible for a RRR serial robot to have 360 rotation of all joints without the links interfering. Sketch a figure that illustrates this and include any constraints on the dimensions if necessary. 5. Sketch an RRR serial robot in a configuration where the reverse displacement analysis yields an indetermi- nate joint angle solution. What special dimensions and/or joint angles are necessary? Hint: think about displacement singularities.
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts