

1 Vectored Thrust Aircraft The purpose of this question is to show that the LQG controller...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
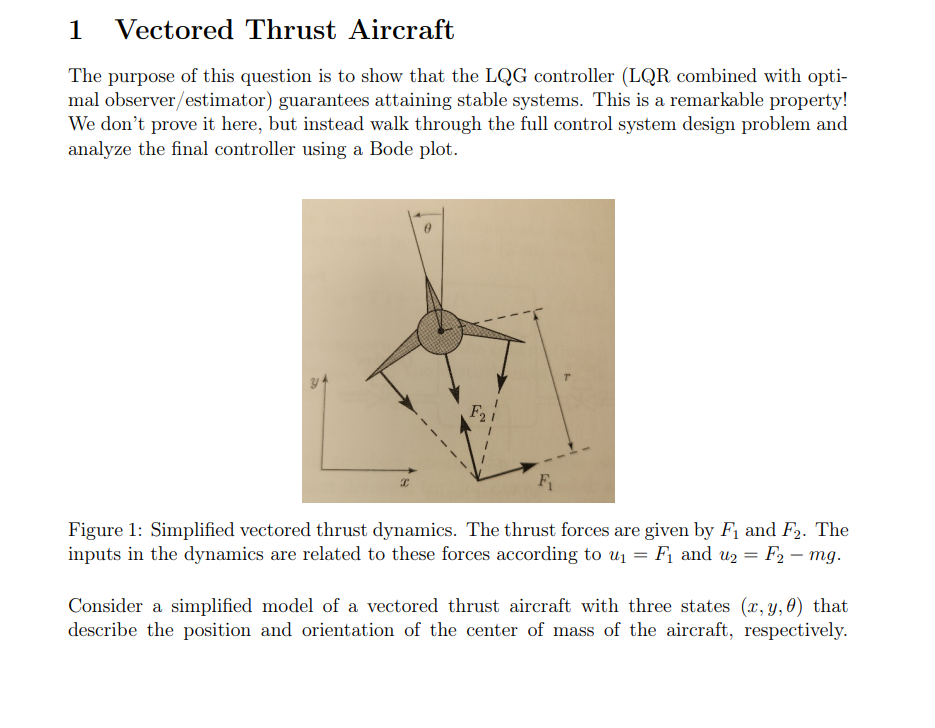
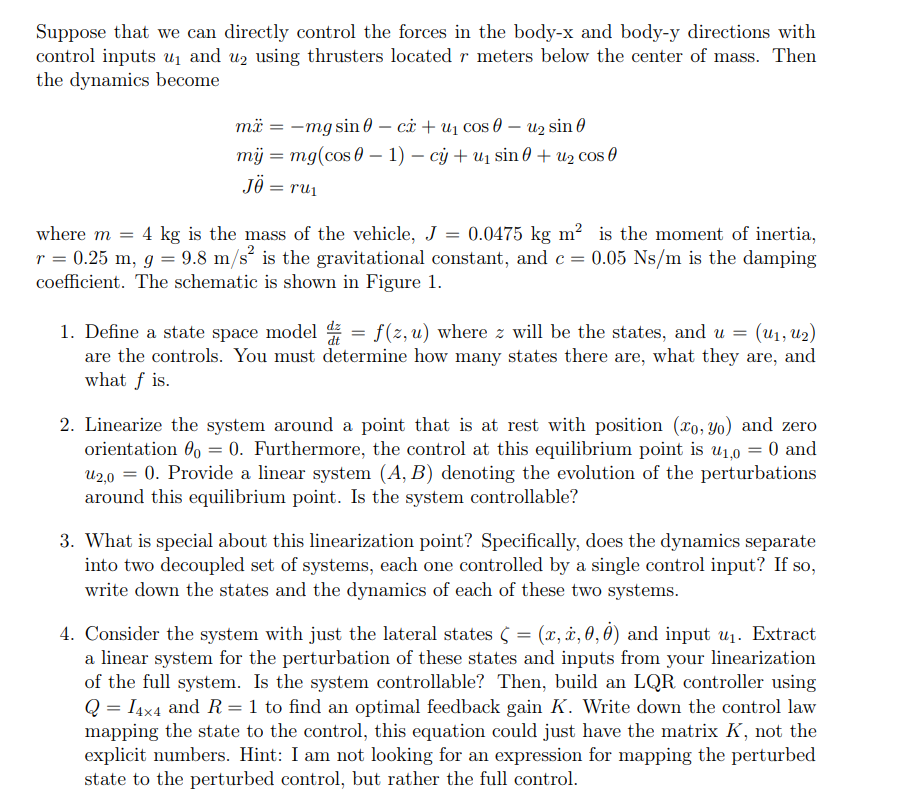
1 Vectored Thrust Aircraft The purpose of this question is to show that the LQG controller (LQR combined with opti- mal observer/estimator) guarantees attaining stable systems. This is a remarkable property! We don't prove it here, but instead walk through the full control system design problem and analyze the final controller using a Bode plot. Figure 1: Simplified vectored thrust dynamics. The thrust forces are given by F and F2. The inputs in the dynamics are related to these forces according to u = F and u2 = F2 mg. - Consider a simplified model of a vectored thrust aircraft with three states (x, y, 0) that describe the position and orientation of the center of mass of the aircraft, respectively. Suppose that we can directly control the forces in the body-x and body-y directions with control inputs u and u using thrusters located r meters below the center of mass. Then the dynamics become where m = mx = -mg sin - cx+u cos 0 - u sin mimg(cos 0 1) - c + u sin 0 + u cos J = ru - 4 kg is the mass of the vehicle, J = 0.0475 kg m2 is the moment of inertia, r = 0.25 m, g = 9.8 m/s is the gravitational constant, and c = 0.05 Ns/m is the damping coefficient. The schematic is shown in Figure 1. 1. Define a state space model d = f(z, u) where z will be the states, and u = (U1, U2) are the controls. You must determine how many states there are, what they are, and what f is. 2. Linearize the system around a point that is at rest with position (xo, yo) and zero orientation = 0. Furthermore, the control at this equilibrium point is u1,0 = 0 and u2,0 = 0. Provide a linear system (A, B) denoting the evolution of the perturbations around this equilibrium point. Is the system controllable? 3. What is special about this linearization point? Specifically, does the dynamics separate into two decoupled set of systems, each one controlled by a single control input? If so, write down the states and the dynamics of each of these two systems. 4. Consider the system with just the lateral states ( = (x, x, 0, 0) and input u. Extract a linear system for the perturbation of these states and inputs from your linearization of the full system. Is the system controllable? Then, build an LQR controller using Q = 144 and R = 1 to find an optimal feedback gain K. Write down the control law mapping the state to the control, this equation could just have the matrix K, not the explicit numbers. Hint: I am not looking for an expression for mapping the perturbed state to the perturbed control, but rather the full control. 1 Vectored Thrust Aircraft The purpose of this question is to show that the LQG controller (LQR combined with opti- mal observer/estimator) guarantees attaining stable systems. This is a remarkable property! We don't prove it here, but instead walk through the full control system design problem and analyze the final controller using a Bode plot. Figure 1: Simplified vectored thrust dynamics. The thrust forces are given by F and F2. The inputs in the dynamics are related to these forces according to u = F and u2 = F2 mg. - Consider a simplified model of a vectored thrust aircraft with three states (x, y, 0) that describe the position and orientation of the center of mass of the aircraft, respectively. Suppose that we can directly control the forces in the body-x and body-y directions with control inputs u and u using thrusters located r meters below the center of mass. Then the dynamics become where m = mx = -mg sin - cx+u cos 0 - u sin mimg(cos 0 1) - c + u sin 0 + u cos J = ru - 4 kg is the mass of the vehicle, J = 0.0475 kg m2 is the moment of inertia, r = 0.25 m, g = 9.8 m/s is the gravitational constant, and c = 0.05 Ns/m is the damping coefficient. The schematic is shown in Figure 1. 1. Define a state space model d = f(z, u) where z will be the states, and u = (U1, U2) are the controls. You must determine how many states there are, what they are, and what f is. 2. Linearize the system around a point that is at rest with position (xo, yo) and zero orientation = 0. Furthermore, the control at this equilibrium point is u1,0 = 0 and u2,0 = 0. Provide a linear system (A, B) denoting the evolution of the perturbations around this equilibrium point. Is the system controllable? 3. What is special about this linearization point? Specifically, does the dynamics separate into two decoupled set of systems, each one controlled by a single control input? If so, write down the states and the dynamics of each of these two systems. 4. Consider the system with just the lateral states ( = (x, x, 0, 0) and input u. Extract a linear system for the perturbation of these states and inputs from your linearization of the full system. Is the system controllable? Then, build an LQR controller using Q = 144 and R = 1 to find an optimal feedback gain K. Write down the control law mapping the state to the control, this equation could just have the matrix K, not the explicit numbers. Hint: I am not looking for an expression for mapping the perturbed state to the perturbed control, but rather the full control.
Expert Answer:
Answer rating: 100% (QA)
To analyze the control system design problem for the simplified vectored thrust aircraft lets break ... View the full answer

Posted Date:
Students also viewed these mechanical engineering questions
-
Account Name Account No. Debit Credit Regular Pay 30000-601 $3,200 Holiday Pay 30000-602 $250 CPP Contributions Payable 20000-203 $0 EI Premiums Payable 20000-205 $54.51 Federal Income Tax Payable...
-
K (Calculating project cash flows and NPV) Raymobile Motors is considering the purchase of a new production machine for $400,000. The purchase of this machine will result in an increase in eamings...
-
Which item is included in the reuse calculation for Materials and Resources Credit, Building Life-Cycle Impact Reduction? Calculator A Floor decking Asbestos insulation C Exterior glazing Help:...
-
rn Explain in some detail how the Precision Tree calculations in Figure 6.11 for the Acme problem are exactly the same as those for the hand-drawn decision tree in Figure 6.6. In other words, explain...
-
David M. Fox was a distributor of tools manufactured and sold by Matco Tools Corporation (Matco). Cox purchased tools from Matco, using a credit line that he repaid as the tools were sold. The credit...
-
Locate the center of gravity G(xc, yc) of the streetlight. Neglect the thickness of each segment. The mass per unit length of each segment is given. Given: a = 1 m = AB 12kg/m b = 3 m = BC 8kg/m c...
-
Explain the difference between the designed in and the inspected in product quality.
-
Adria Lopezs two departments, computer consulting services and computer workstation furniture manufacturing, have each been profitable. Adria has heard of the balanced scorecard and wants you to...
-
The operations vice-president of the Regal Bank of Canada, Kristin Wu, has been interested in investigating the efficiency of the bank's operations. She has been particularly concerned about the...
-
A radiator plate of 0.2-m (wide) x 0.4-m (height) is in a room of 22C. One side (the hot side facing the room) of the radiator plate is maintained at a temperature of 80C, the other sides are assumed...
-
Gate Industries manufactures a standard model and a deluxe model of skateboard. The company, which uses a activity-based costing, applies overhead $20,000 of its overhead based on number of setups...
-
Consider the pressure - volume diagram shown with the following values: p 1 = 2 . 4 atm p 2 = 5 . 9 atm IN 1 = 2 . 4 L IN 2 = 8 . 6 L During the process labeled A B , 2 4 0 0 J of heat is added to...
-
Discuss the factors that accountants should consider when setting up Commonwealth Bank and National Australian Bank accounting policy relating to PPE.
-
Use Matlab to solve the simultaneous linear algebraic equations to solve for all currents: 4 R = 15 R = 10 R = 15 www 2 R = 50 ww R = 20 0 R = 50 ww OV = 200 volts O V = 0 volts 6
-
What is the run-time for the following algorithm? for (int i = 0; i < size/2; i++) { } System.out.println(arr[i] + " ") ;
-
Last year, Scotty Mossop transferred investments that pay interest of $120,000 per annum to a family trust where the beneficiaries of the trust are Scotty's spouse, Rylee, and their two children,...
-
The graph of an equation is given. (a) Find the intercepts. (b) Indicate whether the graph is symmetric with respect to the x-axis, the y-axis, or the origin. -3 6 -6 3 x
-
What is a variance? For what purpose is it used?
-
The following expenses are incurred in a shipping department. Identify those costs which are controllable by the manager of the department. (a) supplies (b) shipping clerk's salary (c) depreciation...
-
For each of the following examples of factory costs, indicate whether each most likely is controllable by the plant manager \((\mathrm{P})\), the supervisor of repair and maintenance...

Study smarter with the SolutionInn App