

Question: 2 . ( 1 5 points ) Now consider a more typical 6 R industrial robot arm, configured with the reference coordinate system as shown
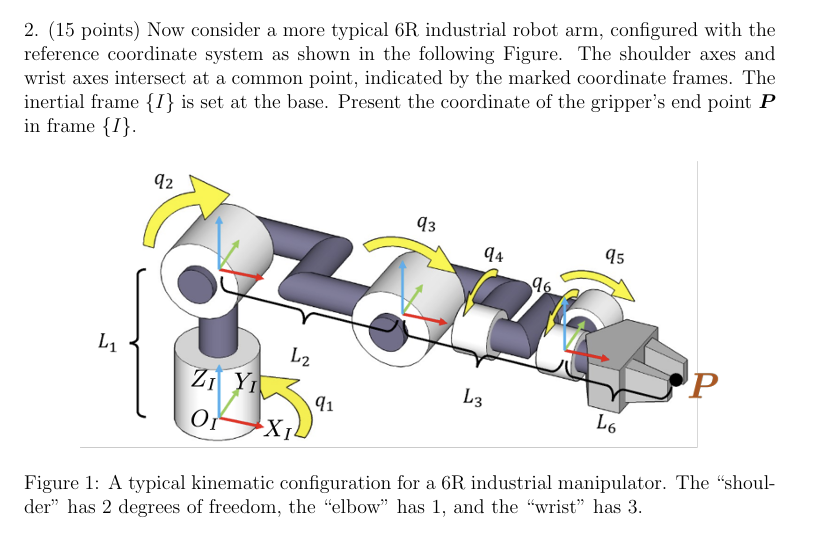
points Now consider a more typical R industrial robot arm, configured with the reference coordinate system as shown in the following Figure. The shoulder axes and wrist axes intersect at a common point, indicated by the marked coordinate frames. The inertial frame I is set at the base. Present the coordinate of the gripper's end point boldsymbolP in frame I
Figure : A typical kinematic configuration for a R industrial manipulator. The "shoulder" has degrees of freedom, the "elbow" has and the "wrist" has
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock