

Question: 2. For the DC motor ys us) we use the general structure shown in Fig. 2 to introduce the s(s+1) reference input and design the
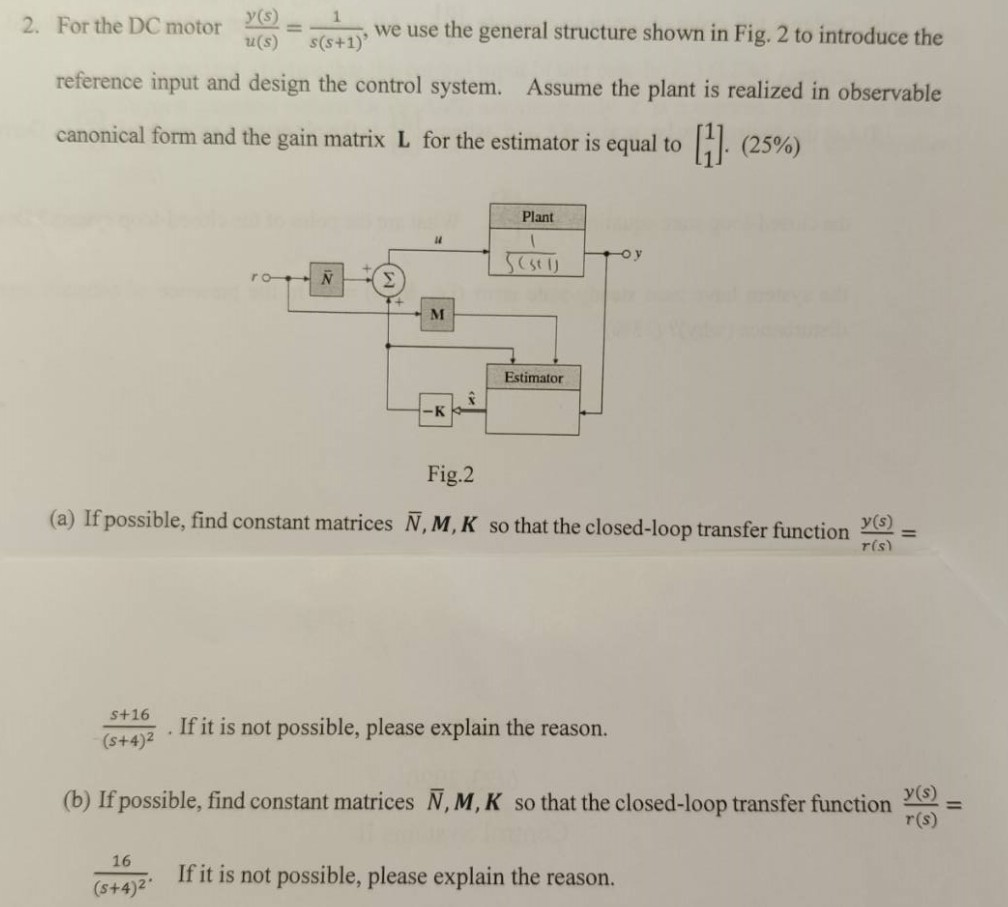
2. For the DC motor ys us) we use the general structure shown in Fig. 2 to introduce the s(s+1) reference input and design the control system. Assume the plant is realized in observable canonical form and the gain matrix L for the estimator is equal to [1]. (25%) Plant Oy Sest ro- N M Estimator -K Fig.2 (a) If possible, find constant matrices ,M,K so that the closed-loop transfer function y(s) ris) S+16 (s+4)2 If it is not possible, please explain the reason. (b) If possible, find constant matrices N,M,K so that the closed-loop transfer function y(s) r(s) 16 (5+4)2 If it is not possible, please explain the reason. 2. For the DC motor ys us) we use the general structure shown in Fig. 2 to introduce the s(s+1) reference input and design the control system. Assume the plant is realized in observable canonical form and the gain matrix L for the estimator is equal to [1]. (25%) Plant Oy Sest ro- N M Estimator -K Fig.2 (a) If possible, find constant matrices ,M,K so that the closed-loop transfer function y(s) ris) S+16 (s+4)2 If it is not possible, please explain the reason. (b) If possible, find constant matrices N,M,K so that the closed-loop transfer function y(s) r(s) 16 (5+4)2 If it is not possible, please explain the reason
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts