

Question: # 2 : Path planning: ( 3 0 % ) Given the following manipulator with frames, D & H table, and inverse kinematics solution, define
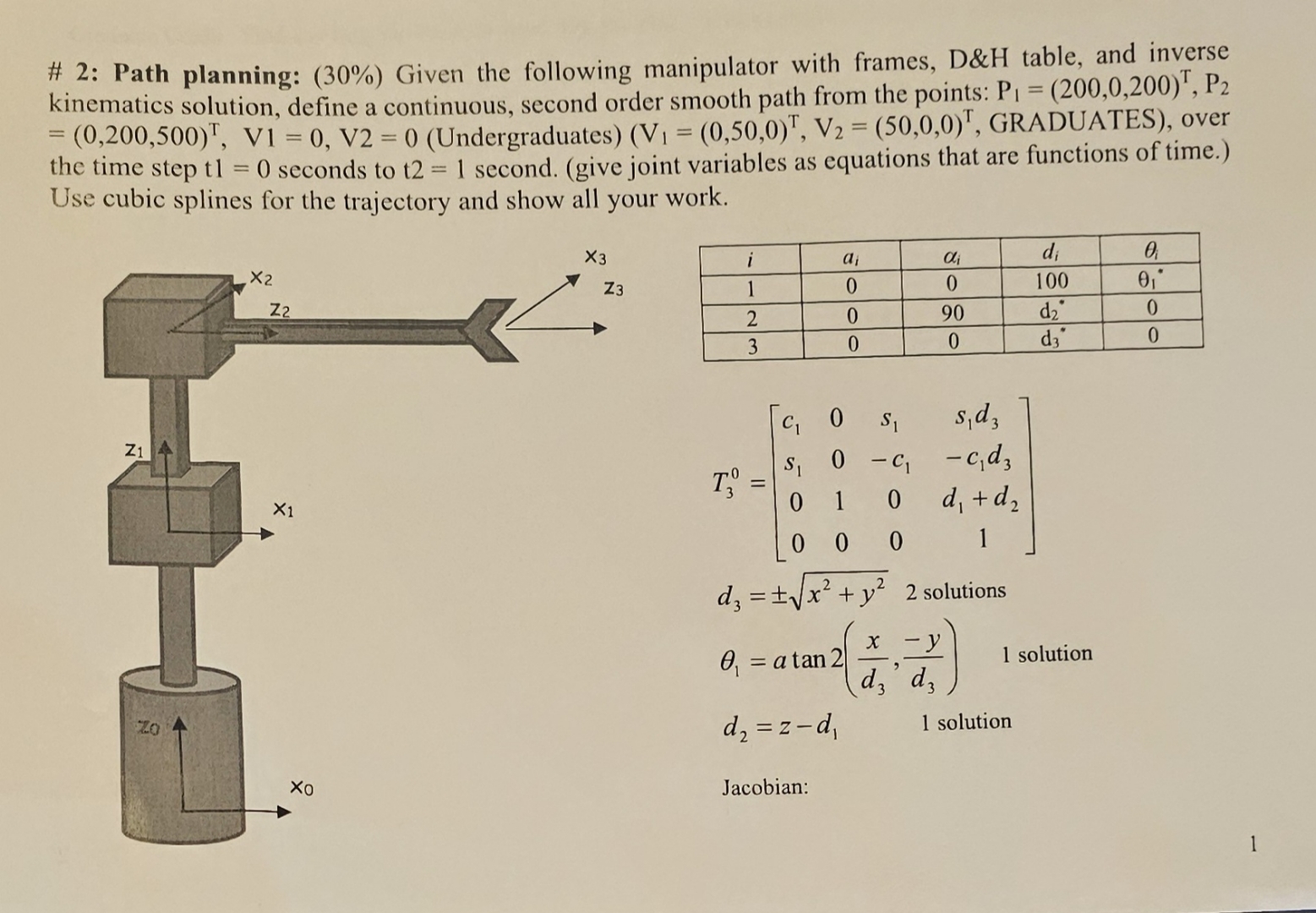
# : Path planning: Given the following manipulator with frames, & table, and inverse kinematics solution, define a continuous, second order smooth path from the points: Undergraduates GRADUATES over the time step seconds to second. give joint variables as equations that are functions of time. Use cubic splines for the trajectory and show all your work.
table
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock