

Question: 20. A Coordinate frame, (A) is located at the base of a robot manipulator. Frame {B} describes the position and orientation of a depth
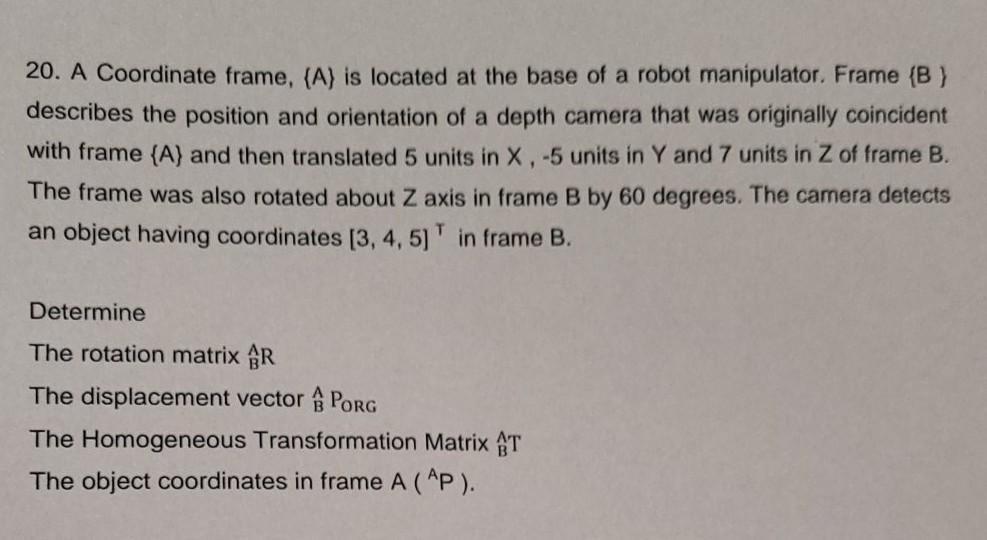
20. A Coordinate frame, (A) is located at the base of a robot manipulator. Frame {B} describes the position and orientation of a depth camera that was originally coincident with frame (A) and then translated 5 units in X, -5 units in Y and 7 units in Z of frame B. The frame was also rotated about Z axis in frame B by 60 degrees. The camera detects an object having coordinates [3, 4, 5] in frame B. Determine The rotation matrix R The displacement vector & PORG The Homogeneous Transformation Matrix T The object coordinates in frame A (AP).
Step by Step Solution
★★★★★
3.45 Rating (158 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock