

Question: 2.15 Consider a single joint of a robot driven by a motor through gear transmission, as shown in Figure P2.15. The joint inertia is
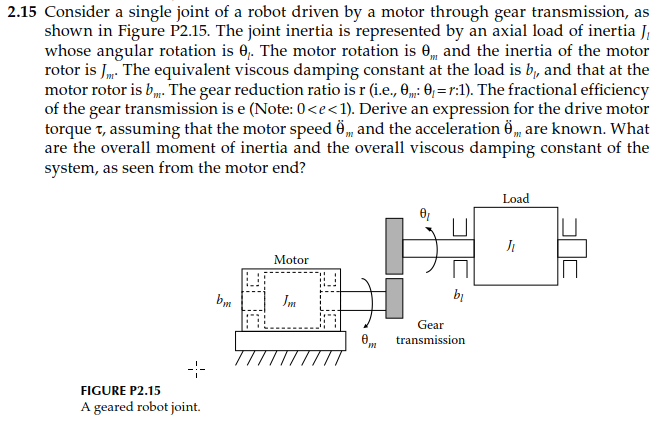
2.15 Consider a single joint of a robot driven by a motor through gear transmission, as shown in Figure P2.15. The joint inertia is represented by an axial load of inertia J whose angular rotation is 0. The motor rotation is 0,,, and the inertia of the motor rotor is J. The equivalent viscous damping constant at the load is by, and that at the motor rotor is b. The gear reduction ratio is r (i.e., 0: 0 =r:1). The fractional efficiency of the gear transmission is e (Note: 0
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock