

Question: == 3. (5 points) Controller design is about balancing competing objective. In this problem you will explore the trade-off between tracking performance and control
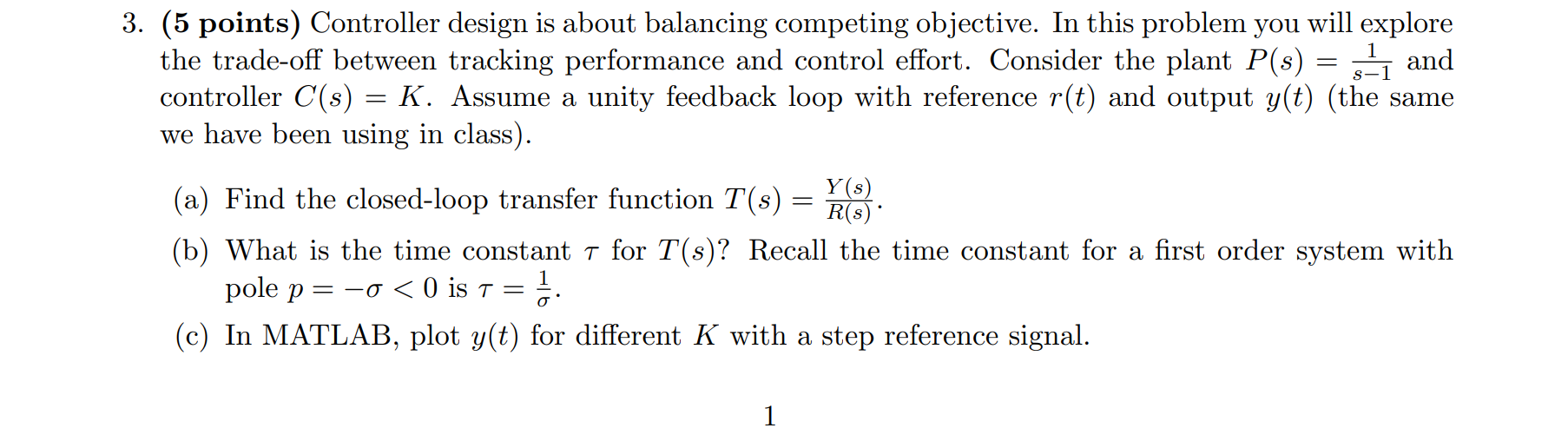
== 3. (5 points) Controller design is about balancing competing objective. In this problem you will explore the trade-off between tracking performance and control effort. Consider the plant P(s) and controller C(s) = K. Assume a unity feedback loop with reference r(t) and output y(t) (the same we have been using in class). (a) Find the closed-loop transfer function T(s) = Y(s) R(s)* (b) What is the time constant 7 for T(s)? Recall the time constant for a first order system with pole p = 0 < 0 is 7 = . (c) In MATLAB, plot y(t) for different K with a step reference signal. 1
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts