

Question: 3 Leg Rotation For this problem, we're going to define the leg as the combined femur-tibia, acting as a rigid body. At the instant
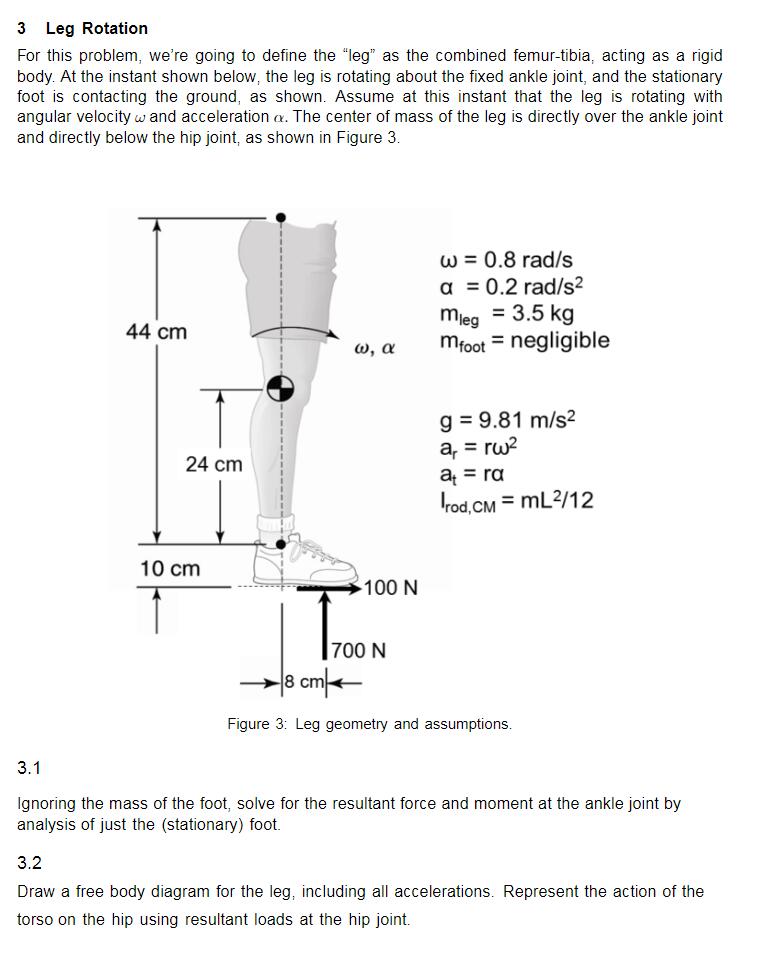
3 Leg Rotation For this problem, we're going to define the "leg" as the combined femur-tibia, acting as a rigid body. At the instant shown below, the leg is rotating about the fixed ankle joint, and the stationary foot is contacting the ground, as shown. Assume at this instant that the leg is rotating with angular velocity w and acceleration a. The center of mass of the leg is directly over the ankle joint and directly below the hip joint, as shown in Figure 3. w 0.8 rad/s a = 0.2 rad/s mleg = 3.5 kg negligible 44 cm , mfoot 24 cm g = 9.81 m/s a = rw Irod,CM = mL2/12 10 cm 8 cm 100 N 700 N Figure 3: Leg geometry and assumptions. 3.1 Ignoring the mass of the foot, solve for the resultant force and moment at the ankle joint by analysis of just the (stationary) foot. 3.2 Draw a free body diagram for the leg, including all accelerations. Represent the action of the torso on the hip using resultant loads at the hip joint.
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts