

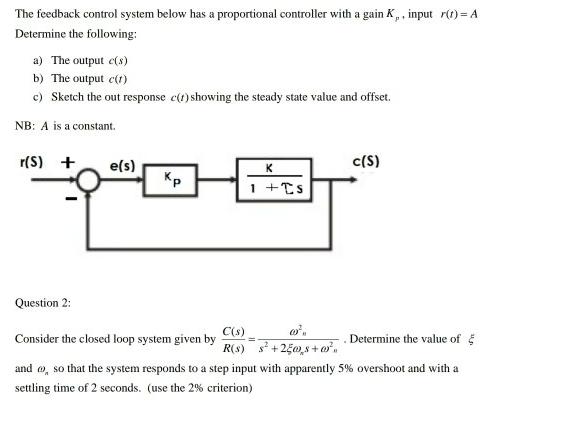
The feedback control system below has a proportional controller with a gain K, , input r(t)=...
Fantastic news! We've Found the answer you've been seeking!
Question:
Expert Answer:

Related Book For 

Posted Date:
