

Question: ( 3 pts ) ( SHOW ME A STEP BY STEP SOLUTION WITH MINITAB ) You are designing a feedback control system for the position
ptsSHOW ME A STEP BY STEP SOLUTION WITH MINITAB You are designing a feedback control system for the position of the magnetically levitated theme park platform shown below. There are two parameters that you can adjust in your design. They are referred to as a proportional gain and derivative gain. Given the dynamics of this system and its anticipated usage, an integral controller is not warranted. Hence, you are designing a PD controller, which is a subset of a full "PID" controller.
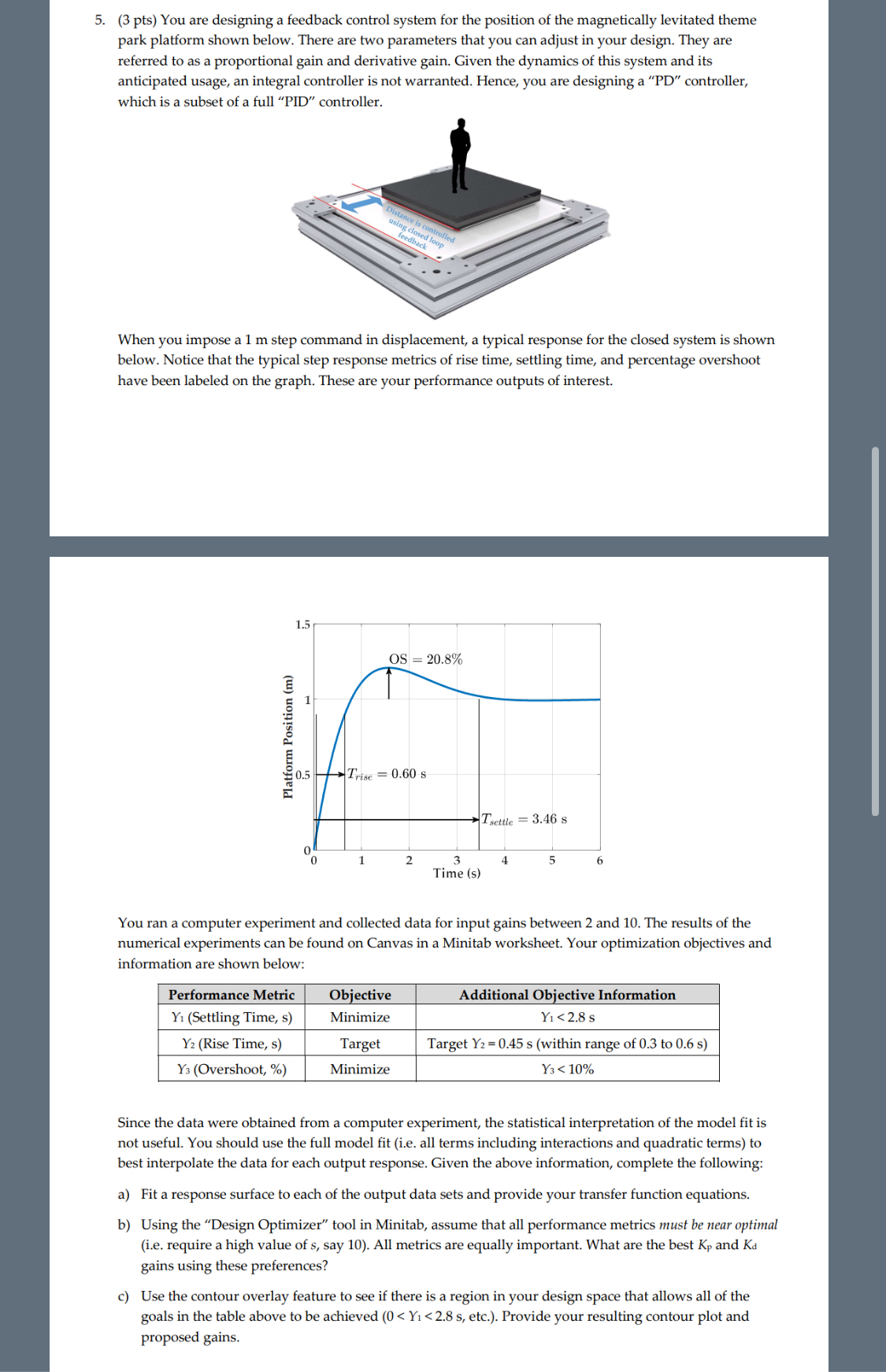
When you impose a m step command in displacement, a typical response for the closed system is shown below. Notice that the typical step response metrics of rise time, settling time, and percentage overshoot have been labeled on the graph. These are your performance outputs of interest.
You ran a computer experiment and collected data for input gains between and The results of the numerical experiments can be found on Canvas in a Minitab worksheet. Your optimization objectives and information are shown below:
tablePerformance Metric,Objective,Additional Objective InformationSettling Time, sMinimize,
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock