

Question: 3 - Using the provided map and robot A which should go to position C , a . Perform and draw the Configuration Space Transform.
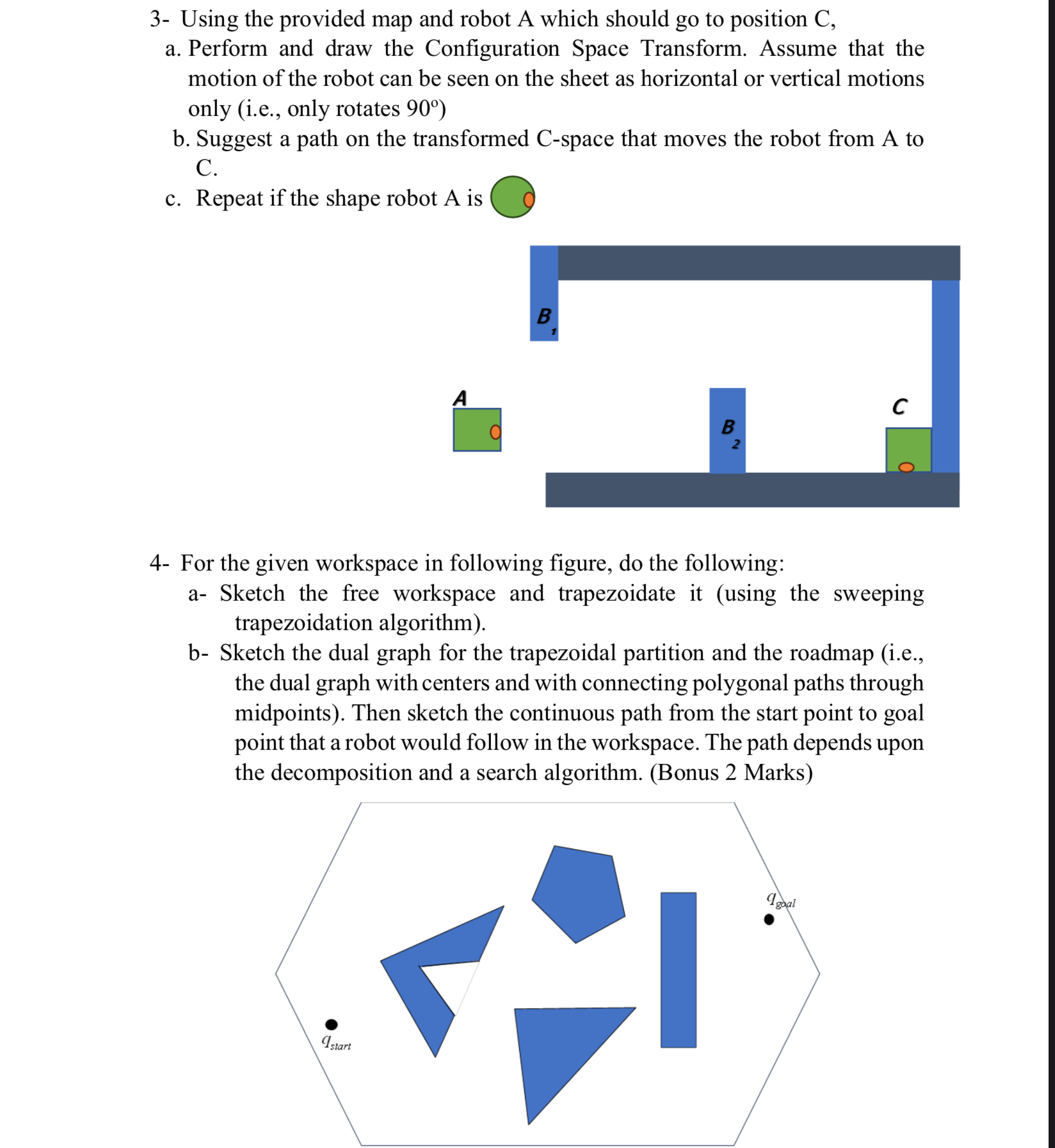
Using the provided map and robot A which should go to position C
a Perform and draw the Configuration Space Transform. Assume that the motion of the robot can be seen on the sheet as horizontal or vertical motions only ie only rotates
b Suggest a path on the transformed Cspace that moves the robot from A to C
c Repeat if the shape robot A is
For the given workspace in following figure, do the following:
a Sketch the free workspace and trapezoidate it using the sweeping trapezoidation algorithm
b Sketch the dual graph for the trapezoidal partition and the roadmap ie the dual graph with centers and with connecting polygonal paths through midpoints Then sketch the continuous path from the start point to goal point that a robot would follow in the workspace. The path depends upon the decomposition and a search algorithm.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock