

Question: 4. Consider a linear-quadratic regular in the context of Section 13.4, but with the following variations: 0 The state dynamics is now st+1 = c
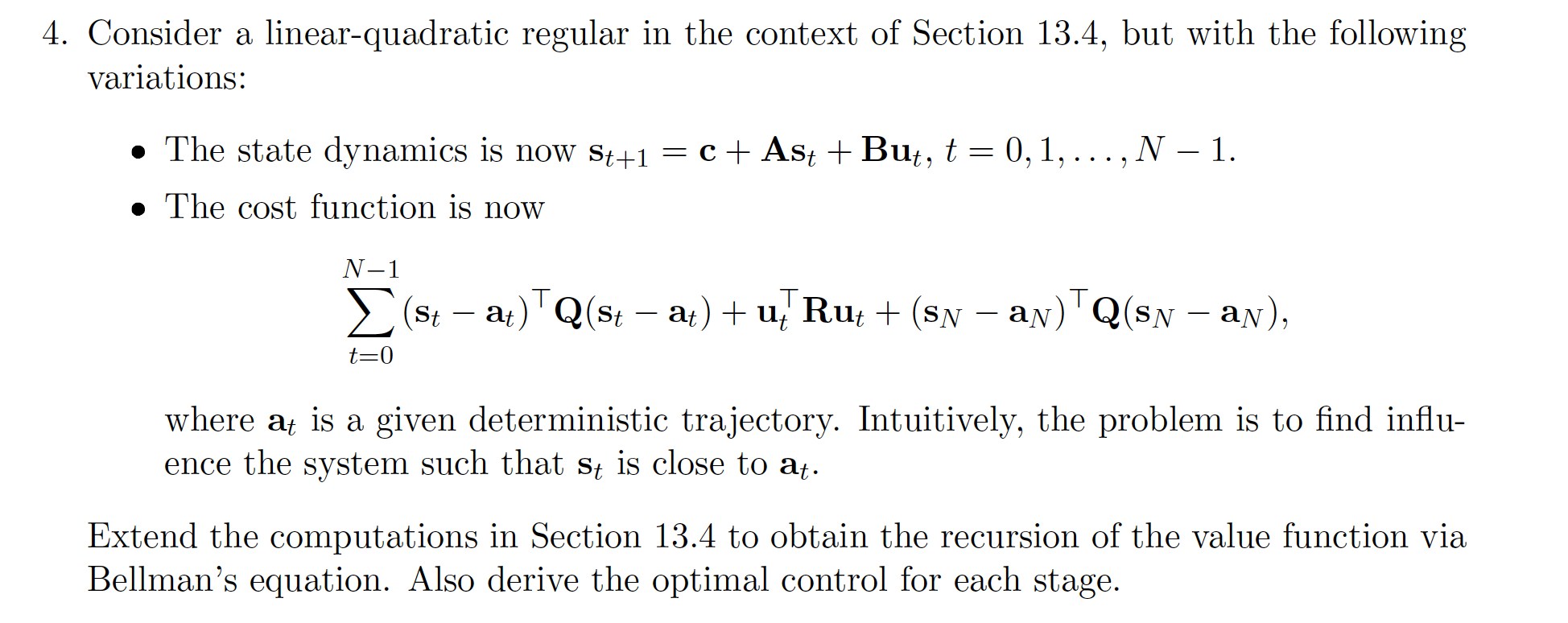
4. Consider a linear-quadratic regular in the context of Section 13.4, but with the following variations: 0 The state dynamics is now st+1 = c + Ast +But, t = 0,1, .. .,N 1. o The cost function is now Nl E (St atlTQ(St at) + utTRut + (SN aNlTleN aN): t=0 Where at is a given deterministic trajectory. Intuitively, the problem is to nd inu ence the system such that st is close to at. Extend the computations in Section 13.4 to obtain the recursion of the value function via Bellman's equation. Also derive the optimal control for each stage
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock