

4-5. The tip of a one-link robot is represented as a position vector P as shown...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
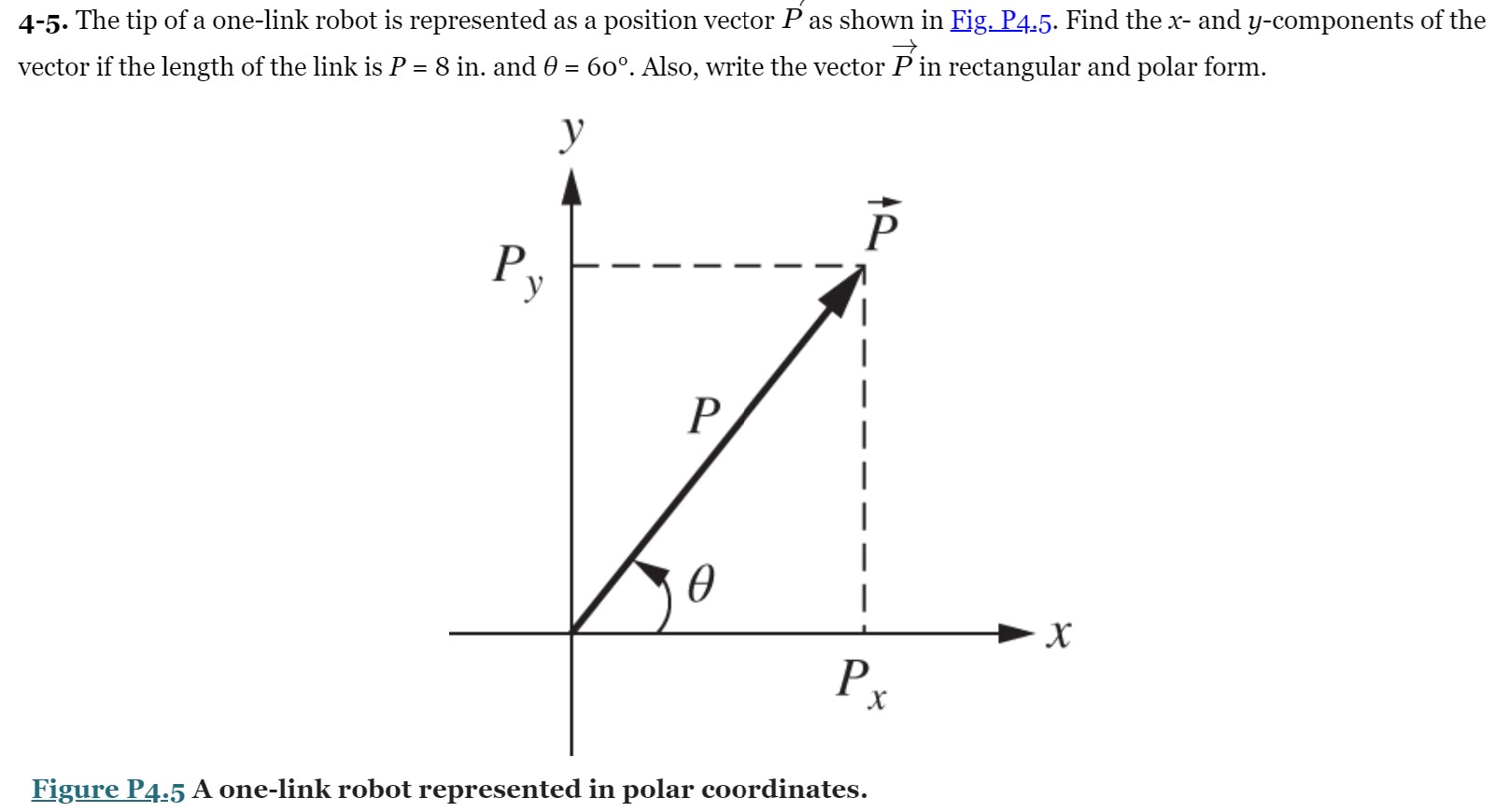
4-5. The tip of a one-link robot is represented as a position vector P as shown in Fig. P4.5. Find the x- and y-components of the vector if the length of the link is P = 8 in. and 0 = 60. Also, write the vector P in rectangular and polar form. Py y P P X Px Figure P4.5 A one-link robot represented in polar coordinates. 4-5. The tip of a one-link robot is represented as a position vector P as shown in Fig. P4.5. Find the x- and y-components of the vector if the length of the link is P = 8 in. and 0 = 60. Also, write the vector P in rectangular and polar form. Py y P P X Px Figure P4.5 A one-link robot represented in polar coordinates.
Expert Answer:

Posted Date:
Students also viewed these mechanical engineering questions
-
(using excel or python or SPSS ). Open the nc.csv dataset, a dataset of 1,000 randomly sampled births from the birth records released by the state of North Carolina in 2004. download the dataset and...
-
Developments in Technology Light is incident from air on the end face of a multimode optical fibre at angle of incidence as shown below. n n 1 2 The refractive indices of the core and cladding are...
-
In this question assume that p and q are atomic formulae. (a) Compare and contrast path formulae and state formulae in temporal logic. [4 marks] (b) Describe and contrast the meanings of F(G p) and...
-
The top 5 stocks in the S&P 500 index, when ranked by market capitalization, make up 22% of the total market capitalization of the S&P 500 index. Numerical estimates of the mean (or expected) rates...
-
Friesens manufactures books. It buys significant quantities of supplies from various vendors in order to make its quality products. Calculate Friesens accounts payable turnover for 2014 and 2013 and...
-
From the following information, prepare the Profit and Loss Account of Ganapati Bank Ltd, for the year ended 31st March, 2016: Interest on Loans Interest on Fixed Deposits Rebate on Bills discounted...
-
Matt Lehti owns the Zap Record Shop. He is in the process of examining the following performance report: Matt is very pleased that the company had favorable variances for sales and income. However,...
-
Disclosures Required in Various Situations Ace Inc. produces electronic components for sale to manufacturers of radios, television sets, and digital sound systems. In connection with her examination...
-
. ABC Corp is considering an asset replacement decision. The existing machine: was bought 2 years ago for $60,000 economic life was 5 years when it was bought tax allowable depreciation is $12,000...
-
Suppose a is a constant. Find the slope of the line that is perpendicular to the line: 0. 1 y a x = 1, a
-
You are involved in the same hobby as your college friend. As a young adult in an intercultural friendship, what would you do to maintain that friendship using cultural similarities, cultural...
-
Starfish T-shirts makes trendy t-shirts and sells them for $10 per t-shirt. Trends change fast in this industry. Recently, the sales manager decided that the company should make a final batch of...
-
Discuss whether the following supply of goods and services are taxable events in GST: 1 . A company having warehouse in Mumbai shifted some raw material to its factory in Baroda 2 . An Indian company...
-
Year 1 April 20 Purchased $39,500 of merchandise on credit from Locust, terms n/30. May 19 Replaced the April 20 account payable to Locust with a 90-day, 8%, $35,000 note payable along with paying...
-
Taylor, a single taxpayer, has $ 1 6 , 7 0 0 AGI. Assume the taxable year is 2 0 2 3 . Use Standard Deduction Table. Married filing jointly and surviving spouses $ 2 7 , 7 0 0 Married filing...
-
III. IV. System Analysis This section should be written after conducting the client interview, essentially providing a high-level overview of the existing system and its perceived problems from the...
-
Determine the values of the given trigonometric functions directly on a calculator. The angles are approximate. tan 0.8035
-
Question: Marvin asks Sheila, a qualified auto mechanic, to fix his engine, which constantly stalls (stops) while driving. When Marvin returns, Sheila informs him that the engine is now "Perfect-runs...
-
2. Joya is the head of the personal insurance division of a large insurance company. Six months before, she was almost promoted to vice-president, but she lost out to Bill, a colleague from another...
-
4. Mark is an executive for a multinational office equipment company that would like to enter the potentially vast Chinese market. The official tariffs on office equipment imported into China are so...

Study smarter with the SolutionInn App