

Question: 5 - 1 3 a ( modified ) For the three - link planar manipulator illustrated below, where the manipulator begins at q s and
a modified For the threelink planar manipulator illustrated below, where the manipulator
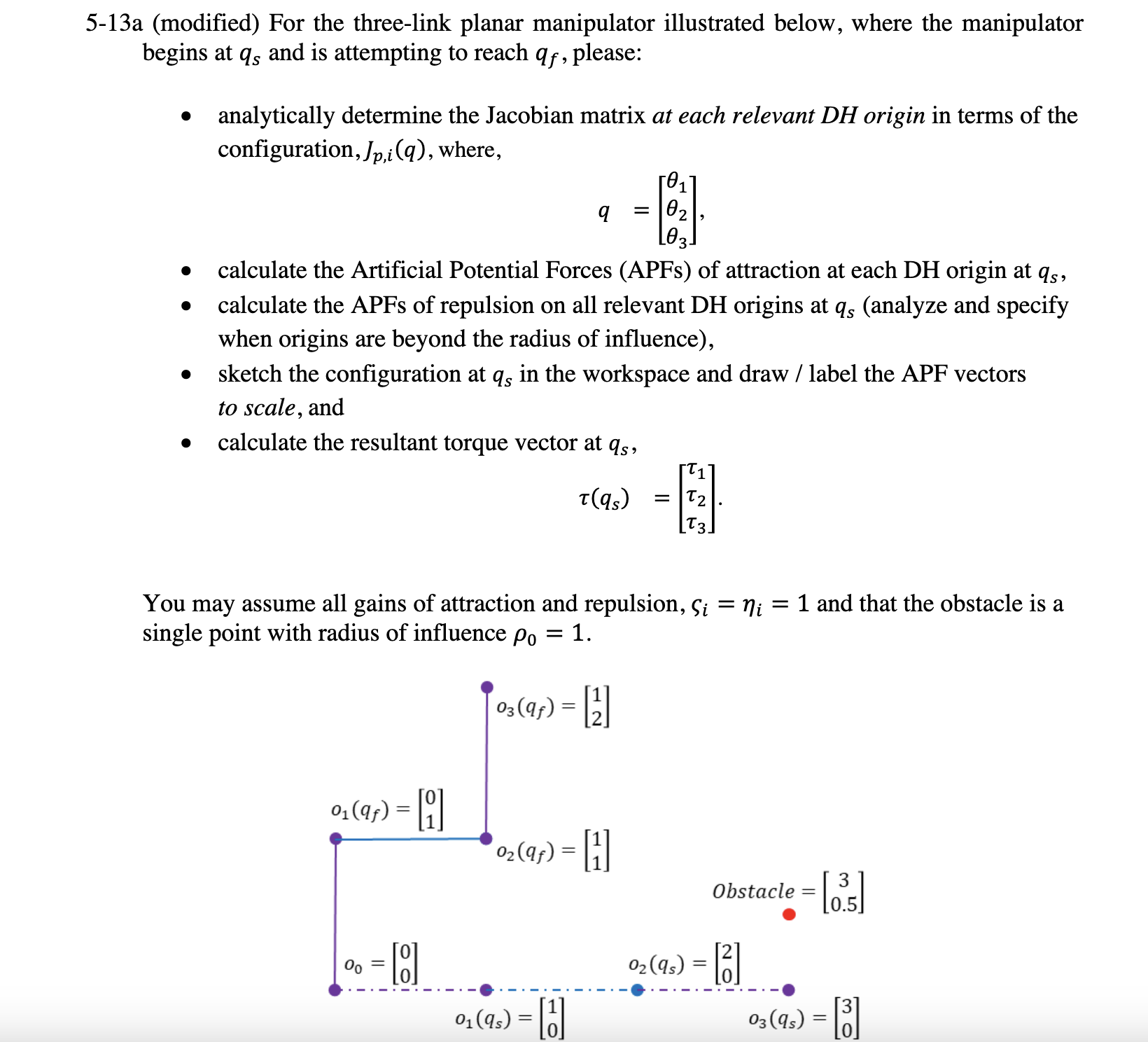
begins at and is attempting to reach please:
analytically determine the Jacobian matrix at each relevant DH origin in terms of the
configuration, where,
calculate the Artificial Potential Forces APFs of attraction at each DH origin at
calculate the APFs of repulsion on all relevant DH origins at analyze and specify
when origins are beyond the radius of influence
sketch the configuration at in the workspace and draw label the APF vectors
to scale, and
calculate the resultant torque vector at
You may assume all gains of attraction and repulsion, and that the obstacle is a
single point with radius of influence
a modified
For the threelink planar manipulator illustrated below, where the manipulator
begins at
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock