

Question: 7. A tracking control problem for a nonlinear oscillator is given by mif+c+k1x+k3x5 = 2((3') = ur(t)+6u where xi?) = Sit](2t) is the reference trajectory
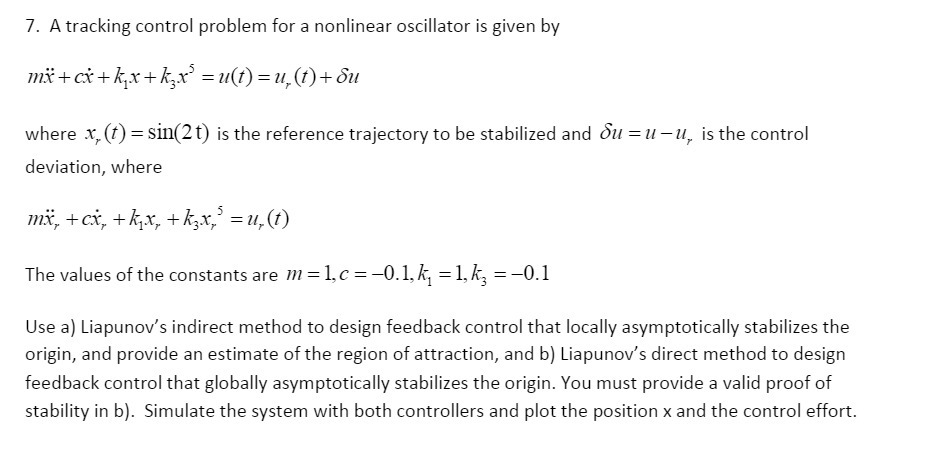
7. A tracking control problem for a nonlinear oscillator is given by mif+c+k1x+k3x5 = 2((3') = ur(t)+6u where xi?) = Sit](2t) is the reference trajectory to be stabilized and 5H = u u, is the control deviation, where mi, +ci, +klx, +.l'3x,j = 1:,(2') The values of the constants are m 21,6 = 0. 1, k1 =1, ft} = 0.1 Use a) Liapunov's indirect method to design feedback control that locally asymptotically stabilizes the origin, and provide an estimate of the region of attraction, and b] Liapunov's direct method to design feedback control that globally asymptotically stabilizes the origin. You must provide a valid proof of stability in b). Simulate the system with both controllers and plot the position x and the control effort
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts