

Question: 7-2 Y (2) U (2) 7 - - 3 (a) (5 pt.) Obtain a state-space representation using the controllable canonical realization. (b) (11 pt.) Design
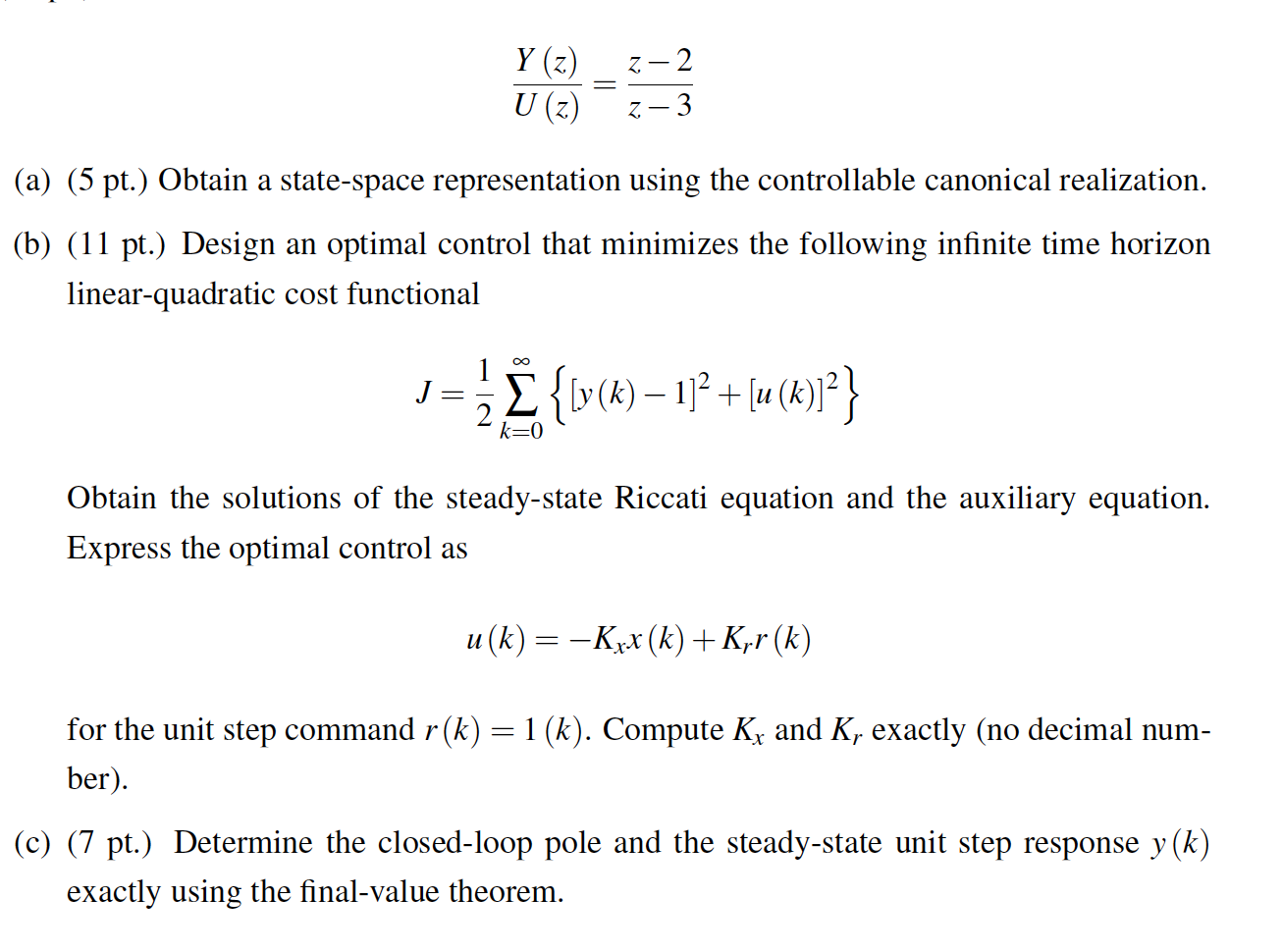
7-2 Y (2) U (2) 7 - - 3 (a) (5 pt.) Obtain a state-space representation using the controllable canonical realization. (b) (11 pt.) Design an optimal control that minimizes the following infinite time horizon linear-quadratic cost functional J = {(k) - 1] + [(4) } k=0 Obtain the solutions of the steady-state Riccati equation and the auxiliary equation. Express the optimal control as u(k)= -K*(k) + Kr(k) for the unit step command r(k) = 1 (k). Compute Ky and K, exactly (no decimal num- ber). (c) (7 pt.) Determine the closed-loop pole and the steady-state unit step response y(k) exactly using the final-value theorem. 7-2 Y (2) U (2) 7 - - 3 (a) (5 pt.) Obtain a state-space representation using the controllable canonical realization. (b) (11 pt.) Design an optimal control that minimizes the following infinite time horizon linear-quadratic cost functional J = {(k) - 1] + [(4) } k=0 Obtain the solutions of the steady-state Riccati equation and the auxiliary equation. Express the optimal control as u(k)= -K*(k) + Kr(k) for the unit step command r(k) = 1 (k). Compute Ky and K, exactly (no decimal num- ber). (c) (7 pt.) Determine the closed-loop pole and the steady-state unit step response y(k) exactly using the final-value theorem
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts