

Question: A 3 dof planar robot arm is assigned five key points along a nominal straight - line path at defined points in time. Consider a
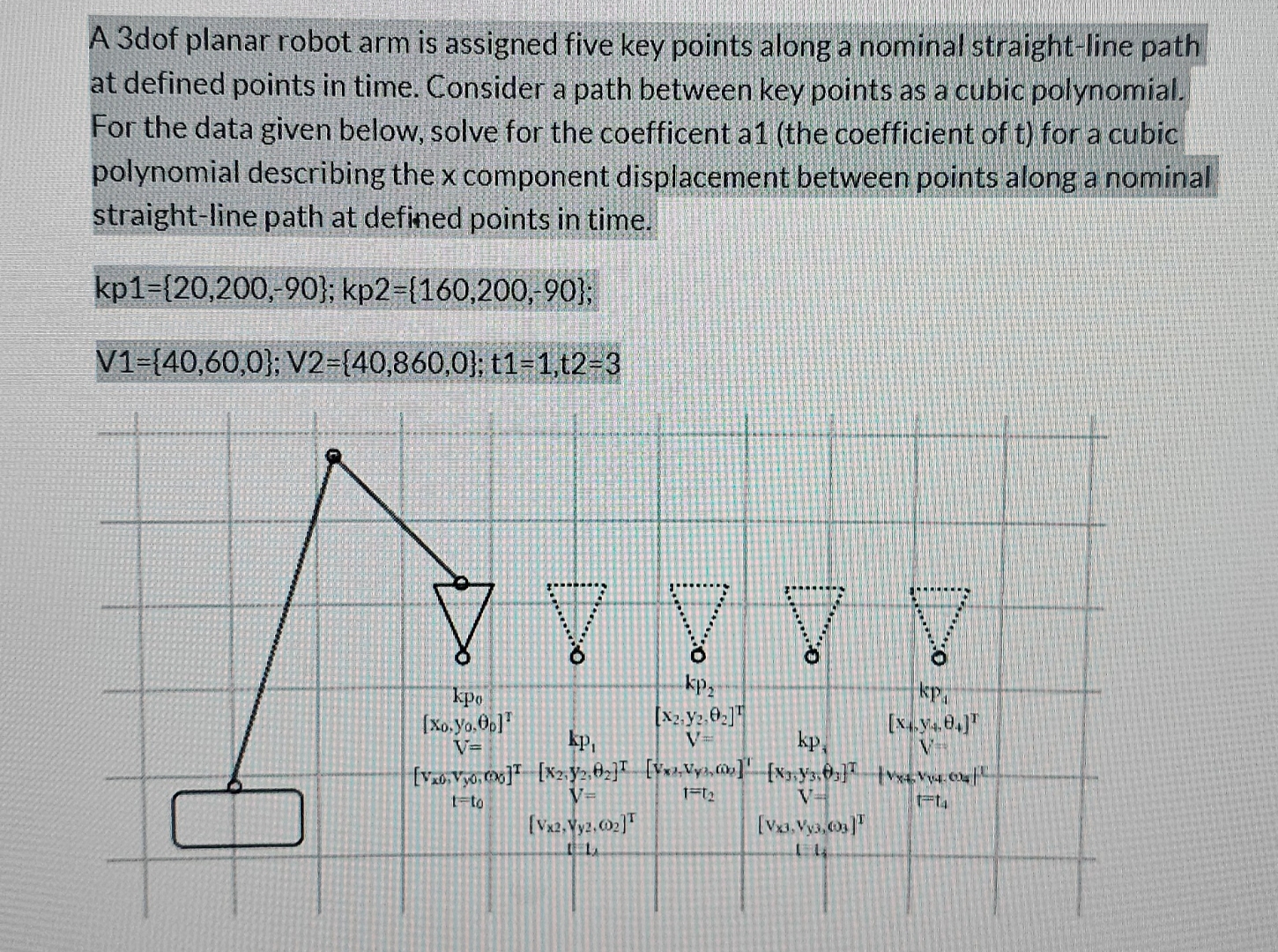
A dof planar robot arm is assigned five key points along a nominal straightline path at defined points in time. Consider a path between key points as a cubic polynomial. For the data given below, solve for the coefficent athe coefficient of for a cubic polynomial describing the component displacement between points along a nominal straightline path at defined points in time.
;;
;;
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock