

Question: A 6 DOF ( P - R - P - R - R - R ) manipulator has been given for kinematics analysis. Find the
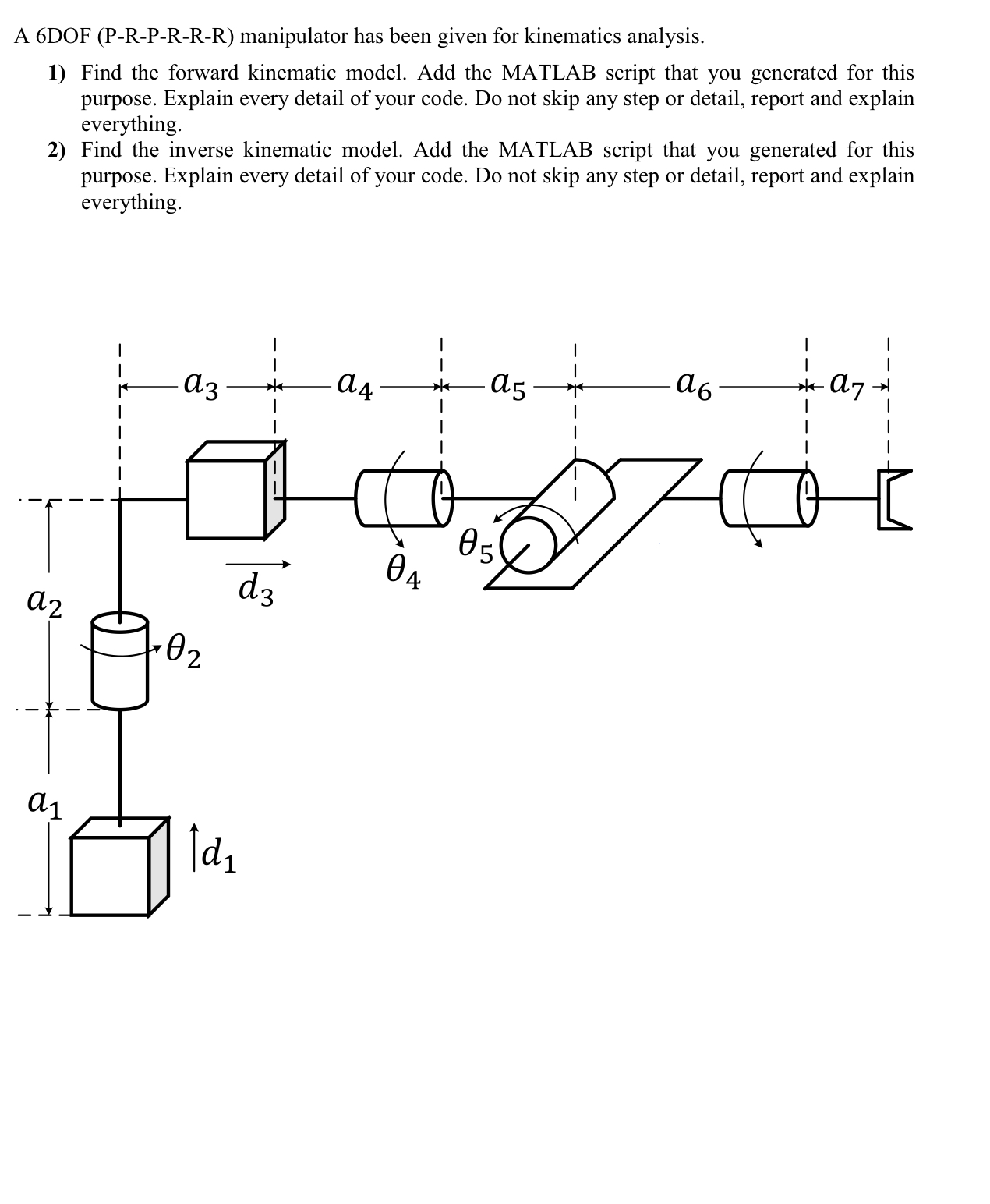
A DOF PRPRRR manipulator has been given for kinematics analysis.
Find the forward kinematic model. Add the MATLAB script that you generated for this purpose. Explain every detail of your code. Do not skip any step or detail, report and explain everything.
Find the inverse kinematic model. Add the MATLAB script that you generated for this purpose. Explain every detail of your code. Do not skip any step or detail, report and explain everything.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock