

Question: A C C A B 60 45 B You are designing a robot whose hand (point A) can move vertically up or down (dashed
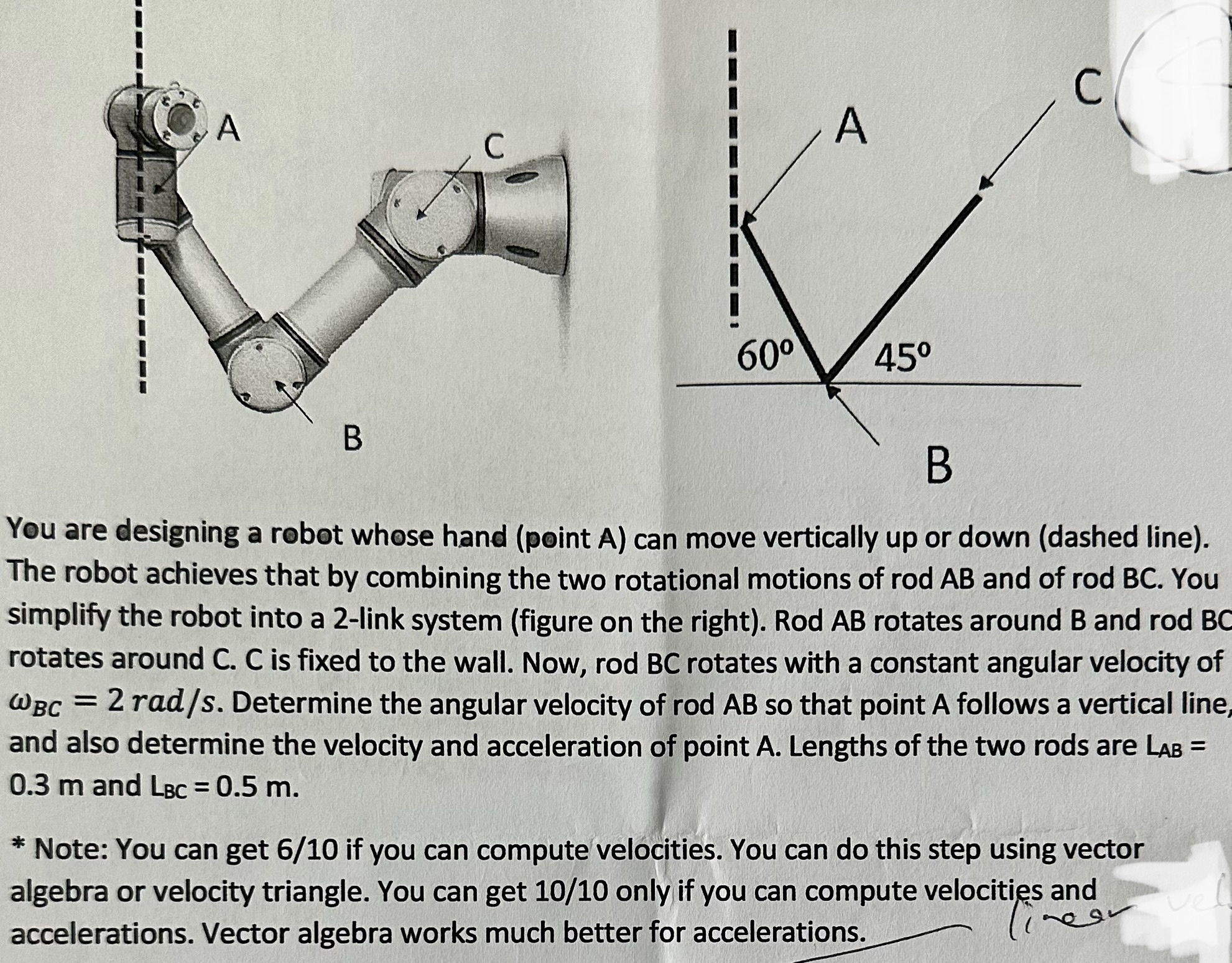
A C C A B 60 45 B You are designing a robot whose hand (point A) can move vertically up or down (dashed line). The robot achieves that by combining the two rotational motions of rod AB and of rod BC. You simplify the robot into a 2-link system (figure on the right). Rod AB rotates around B and rod BC rotates around C. C is fixed to the wall. Now, rod BC rotates with a constant angular velocity of WBC = 2 rad/s. Determine the angular velocity of rod AB so that point A follows a vertical line, and also determine the velocity and acceleration of point A. Lengths of the two rods are LAB = 0.3 m and LBC = 0.5 m. * Note: You can get 6/10 if you can compute velocities. You can do this step using vector algebra or velocity triangle. You can get 10/10 only if you can compute velocities and accelerations. Vector algebra works much better for accelerations. linear
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts