

Question: a d. a) (4 points) Show two possible attachment of link frames on the three-link robot shown in the figure below. b) (5 points) For
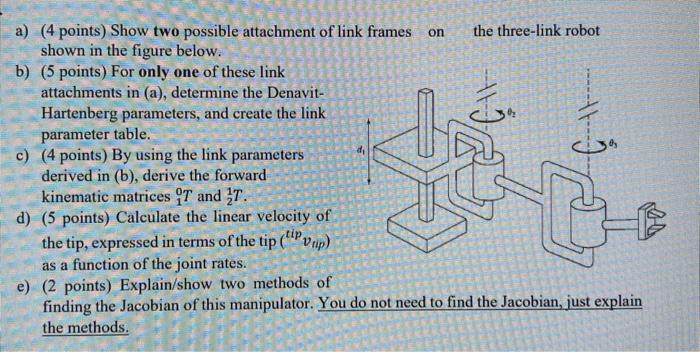
a d. a) (4 points) Show two possible attachment of link frames on the three-link robot shown in the figure below. b) (5 points) For only one of these link attachments in (a), determine the Denavit- Hartenberg parameters, and create the link parameter table. c) (4 points) By using the link parameters derived in (b), derive the forward kinematic matrices T and T. d) (5 points) Calculate the linear velocity of the tip, expressed in terms of the tip ("IP prip) as a function of the joint rates. e) (2 points) Explain/show two methods of finding the Jacobian of this manipulator. You do not need to find the Jacobian, just explain the methods. a d. a) (4 points) Show two possible attachment of link frames on the three-link robot shown in the figure below. b) (5 points) For only one of these link attachments in (a), determine the Denavit- Hartenberg parameters, and create the link parameter table. c) (4 points) By using the link parameters derived in (b), derive the forward kinematic matrices T and T. d) (5 points) Calculate the linear velocity of the tip, expressed in terms of the tip ("IP prip) as a function of the joint rates. e) (2 points) Explain/show two methods of finding the Jacobian of this manipulator. You do not need to find the Jacobian, just explain the methods
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts