

Question: (a) Describe the main three approaches (Cell decomposition, Visibility Graph and Artificial Potential Methods) to robot motion planning in detail. Emphasise their advantages and drawbacks.
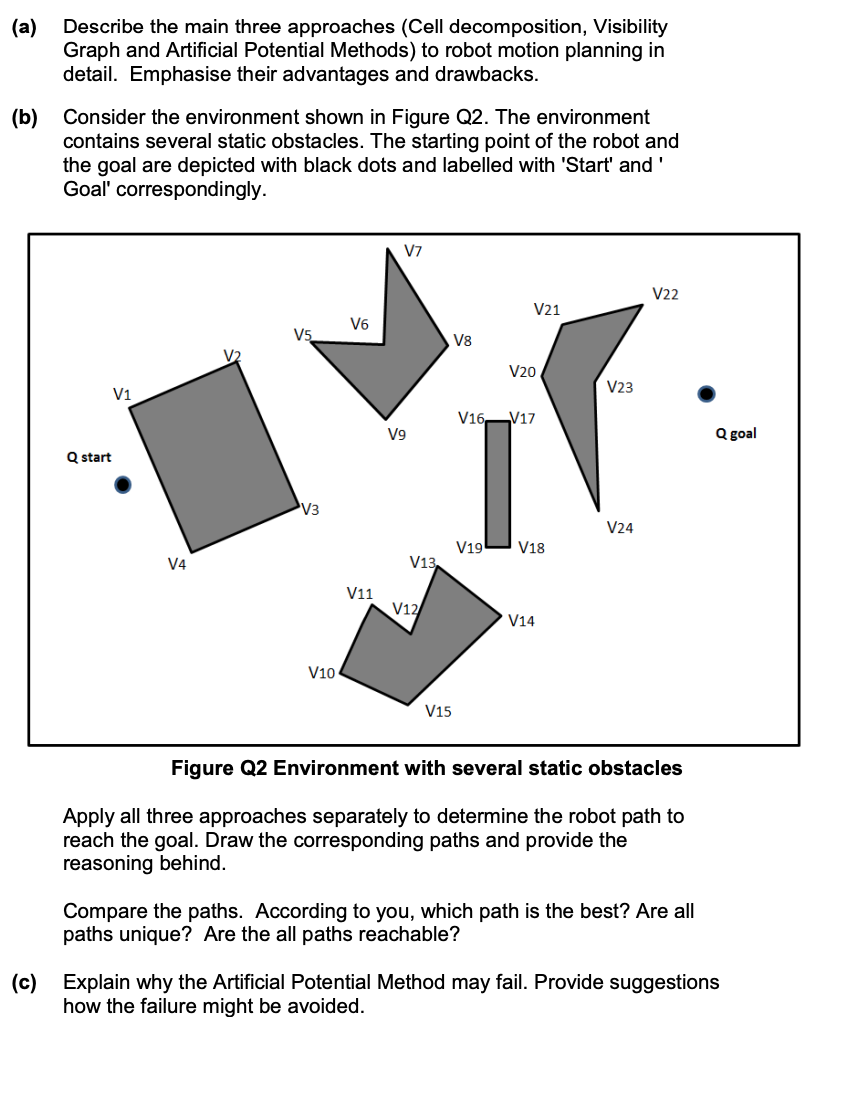
(a) Describe the main three approaches (Cell decomposition, Visibility Graph and Artificial Potential Methods) to robot motion planning in detail. Emphasise their advantages and drawbacks. (b) Consider the environment shown in Figure Q2. The environment contains several static obstacles. The starting point of the robot and the goal are depicted with black dots and labelled with 'Start' and' Goal' correspondingly. V7 V22 V21 V6 V5 V8 V20 Vi V23 V16V17 V9 Q goal Q start V3 V24 V19 V18 V4 V13 V11 V12 V14 V10 V15 Figure Q2 Environment with several static obstacles Apply all three approaches separately to determine the robot path to reach the goal. Draw the corresponding paths and provide the reasoning behind. Compare the paths. According to you, which path is the best? Are all paths unique? Are the all paths reachable? (c) Explain why the Artificial Potential Method may fail. Provide suggestions how the failure might be avoided
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts