

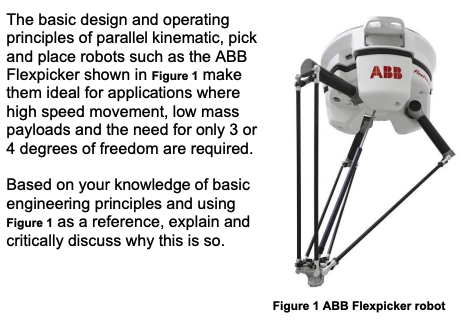
Question: ABB The basic design and operating principles of parallel kinematic, pick and place robots such as the ABB Flexpicker shown in Figure 1 make them
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock