

Question: Add procedure Problem: Consider the elastic shaft robotic arm shown in Figure 1. These kinds of robots are of utmost importance for the study of

Add procedure
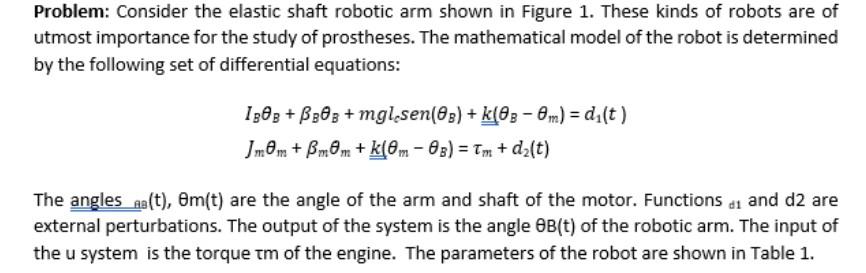
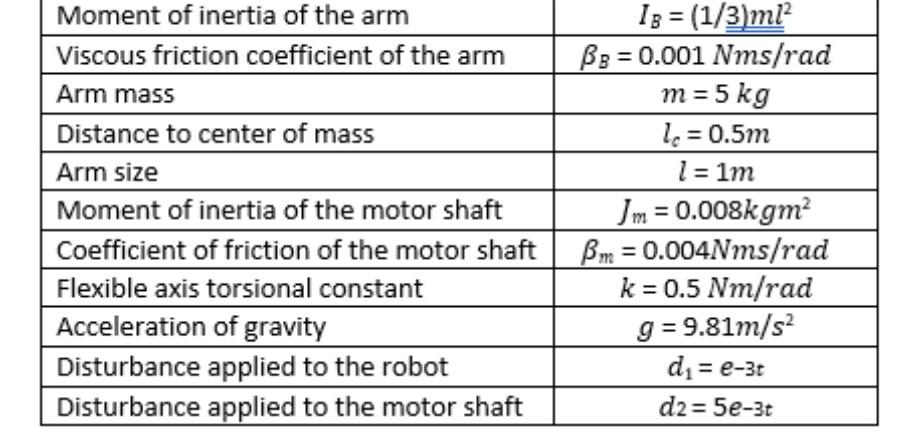
Problem: Consider the elastic shaft robotic arm shown in Figure 1. These kinds of robots are of utmost importance for the study of prostheses. The mathematical model of the robot is determined by the following set of differential equations: 130g + BB03 + mgl.sen() + (08-0m) = d (t) Jmom + Bmom + kom - 0B) = Tm + dz(t) The angles as(t), em(t) are the angle of the arm and shaft of the motor. Functions di and d2 are external perturbations. The output of the system is the angle B(t) of the robotic arm. The input of the u system is the torque tm of the engine. The parameters of the robot are shown in Table 1. c) Determine the sliding surface s(x) for this robot. d) Design a slider mode control u(x) - Ksign(s) that allows the robotic arm (Nonlinear UE = = Moment of inertia of the arm Viscous friction coefficient of the arm Arm mass Distance to center of mass Arm size Moment of inertia of the motor shaft Coefficient of friction of the motor shaft Flexible axis torsional constant Acceleration of gravity Disturbance applied to the robot Disturbance applied to the motor shaft 13 = (1/3) ml? BB = 0.001 Nms/rad m = 5 kg le = 0.5m 1 = 1m m = 0.008kgm? Bm = 0.004Nms/rad k = 0.5 Nm/rad g = 9.81m/s2 d = e-3t d2 = 5e-3t
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts