

Question: Also explain whether seborg or morari is used and why. Please provide quantitative answers and justifications and not just qualitative explanations thank you. Unknown values

Also explain whether seborg or morari is used and why. Please provide quantitative answers and justifications and not just qualitative explanations thank you. Unknown values not given can be assumed/estimated, just state them.
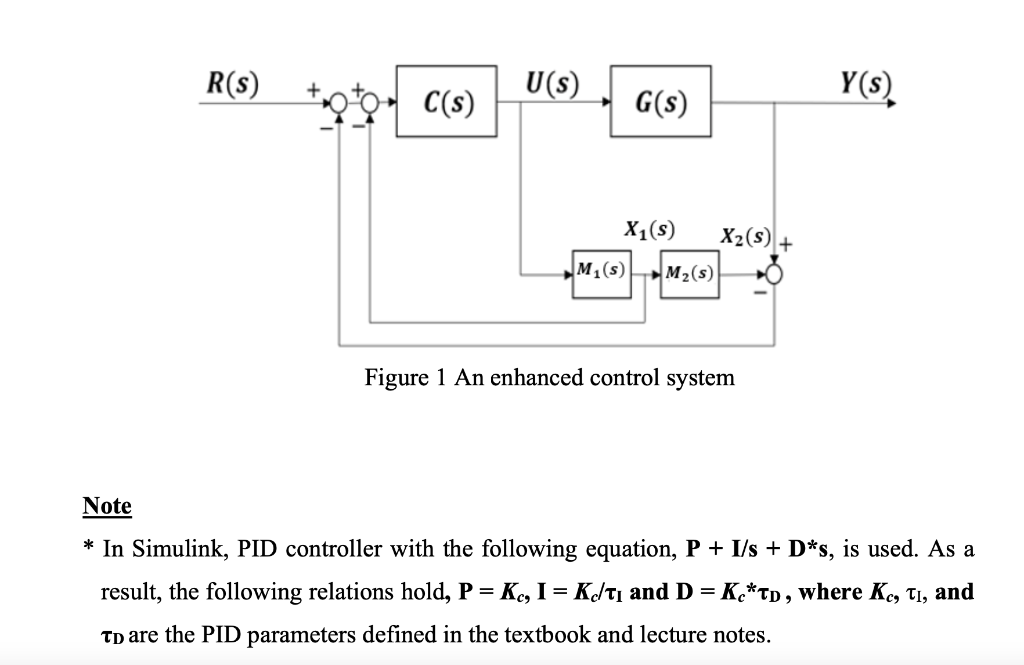
Note * In Simulink, PID controller with the following equation, P+I/s+Ds, is used. As a result, the following relations hold, P=Kc,I=Kc/I and D=KcD, where Kc,I, and D are the PID parameters defined in the textbook and lecture notes. The enhanced control (EC) system depicted in Figure 1 consists of the process G(s), PID/PI controller C(s) and process modelM(s). The modelM(s) is factorized as follows M(s)=M1(s)M2(s) (c)Under perfect model condition, explain why the EC with appropriate factorization of process model, G(s)=M(s)=(s+a)M(s), is capable of giving faster and aggressive closed-loop response compared with the classical feedback (FB) control system when these two control systems are used to control an inverse dynamics in the absence of time delay? To be specific, is M(s) in Figure 1 factorized by Seborg or Morari formula in this case? In order to explain faster performance of the EC, Bode stability analysis results of the EC and FB can be compared, by which the performance difference of these 1 two control systems can be inferred. Since controller is not available, the same controller is employed for the EC and FB for the ease of analysis and comparison of Bode stability results
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts