

Question: An Ackerman mechanism was designed with the dimensions ( a = 0 . 3 mathrm { ~m } ) and (
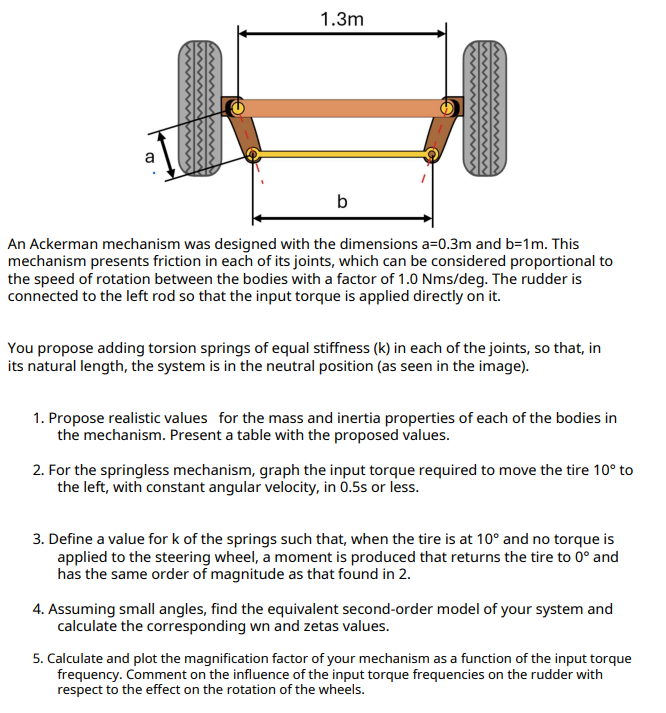
An Ackerman mechanism was designed with the dimensions amathrm~m and bmathrm~m This mechanism presents friction in each of its joints, which can be considered proportional to the speed of rotation between the bodies with a factor of mathrmNmsmathrmdeg The rudder is connected to the left rod so that the input torque is applied directly on it
You propose adding torsion springs of equal stiffness k in each of the joints, so that, in its natural length, the system is in the neutral position as seen in the image
Propose realistic values for the mass and inertia properties of each of the bodies in the mechanism. Present a table with the proposed values.
For the springless mechanism, graph the input torque required to move the tire circ to the left, with constant angular velocity, in s or less.
Define a value for k of the springs such that, when the tire is at circ and no torque is applied to the steering wheel, a moment is produced that returns the tire to circ and has the same order of magnitude as that found in
Assuming small angles, find the equivalent secondorder model of your system and calculate the corresponding wn and zetas values.
Calculate and plot the magnification factor of your mechanism as a function of the input torque frequency. Comment on the influence of the input torque frequencies on the rudder with respect to the effect on the rotation of the wheels.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock