

Question: An open-loop system is described in discrete time state space difference and output equations as follows: [x(k = 1) w(k + 1)] = [0.5 1
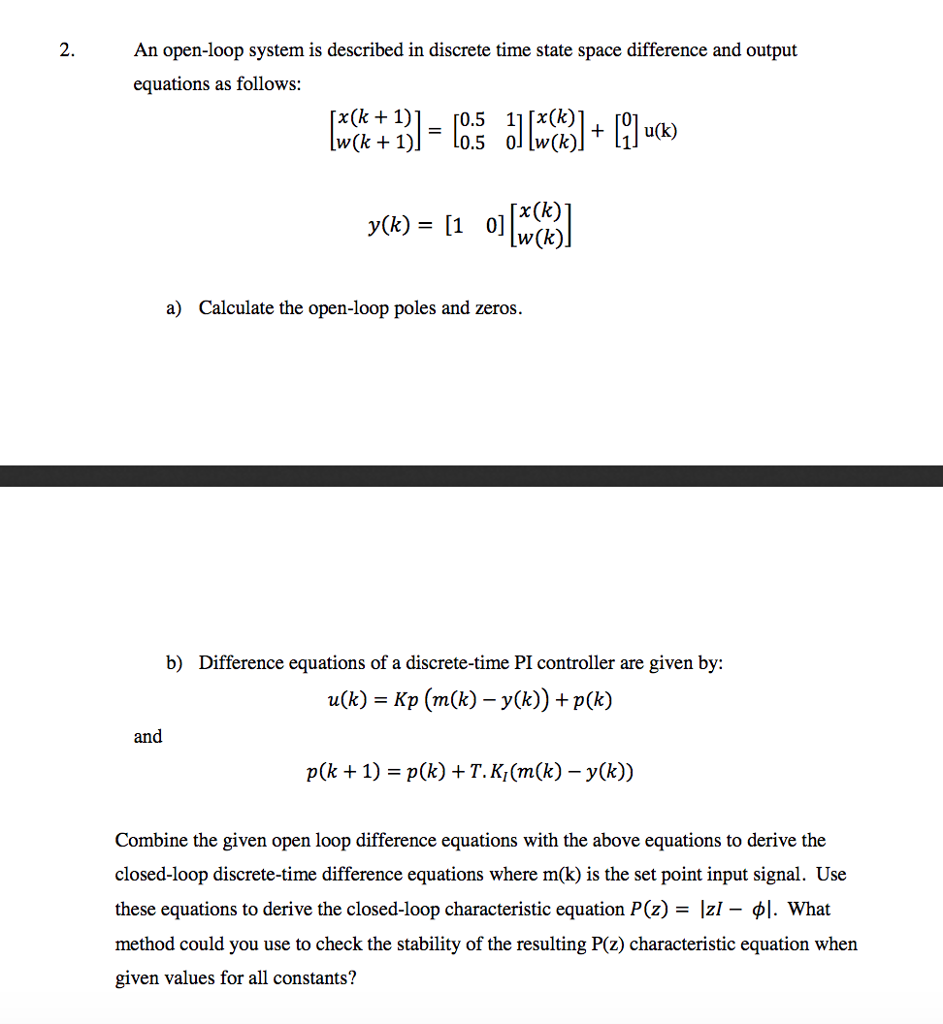
An open-loop system is described in discrete time state space difference and output equations as follows: [x(k = 1) w(k + 1)] = [0.5 1 0.5 0] [x(k) w(k)] + [0 1]u(k) y(k) = [1 0] [x(k) w(k)] a) Calculate the open-loop poles and zeros. b) Difference equations of a discrete-time PI controller are given by: u(k) = K_p(m(k) - y(k)]+p(k) and p(k + 1) = p(k) + T.K_1(m(k) - y(k)) Combine the given open loop difference equations with the above equations to derive the closed-loop discrete-time difference equations where m(k) is the set point input signal. Use these equations to derive the closed-loop characteristic equation P(z) = |z I - phi|. What method could you use to check the stability of the resulting P(z) characteristic equation when given values for all constants
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts