

Question: answer and show me how you got to it with these following 2 questions: What are the transfer functions used in your system ( G
answer and show me how you got to it with these following questions:
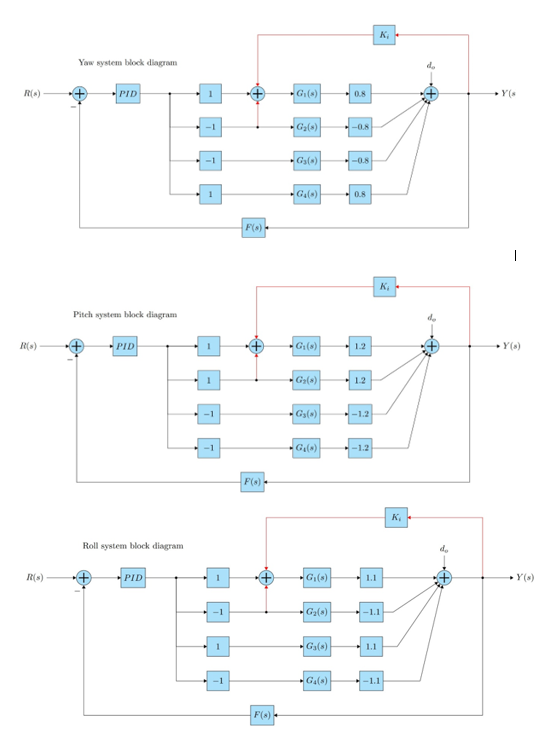
What are the transfer functions used in your system G G G and G
Reduction of the roll system. How did you reduce the model according to block diagram reduction rules and what steps did you take ie the manual approach used
System Information for Modelling it is a quadcopter:
Gs Front left motor.
Gs Front right motor.
Gs Rear left motor.
Gs Rear right motor.
For a quadcopter all motors are identical which means,
Gs Gs Gs Gs
I have calculated Gs through MATLAB.
Gss s
PIDs PID controller transfer function
do Output disturbance
Fs Sensor feedback transfer function, defined as:
Fss
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock