

Question: answer the question in jula code Use least squares to find an open - loop control sequence of length N = 3 0 to drive
answer the question in jula code
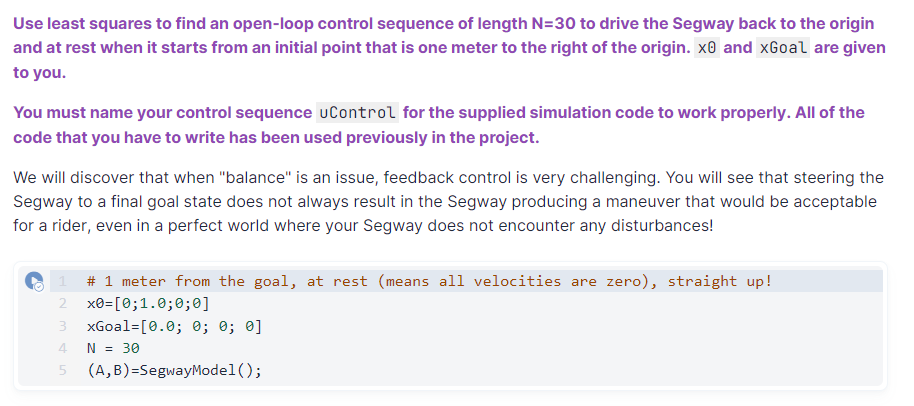
Use least squares to find an openloop control sequence of length to drive the Segway back to the origin
and at rest when it starts from an initial point that is one meter to the right of the origin. and xGoal are given
to you.
You must name your control sequence UControl for the supplied simulation code to work properly. All of the
code that you have to write has been used previously in the project.
We will discover that when "balance" is an issue, feedback control is very challenging. You will see that steering the
Segway to a final goal state does not always result in the Segway producing a maneuver that would be acceptable
for a rider, even in a perfect world where your Segway does not encounter any disturbances!
# meter from the goal, at rest means all velocities are zero straight up
;;;
xGoal;;;
SegwayModel ;
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock