

Question: As we saw in class, the brightness constancy equation Iz(x, y)u(x, y) + Iy(x, y)v(x, y) + (x, y) = 0, (1) does not
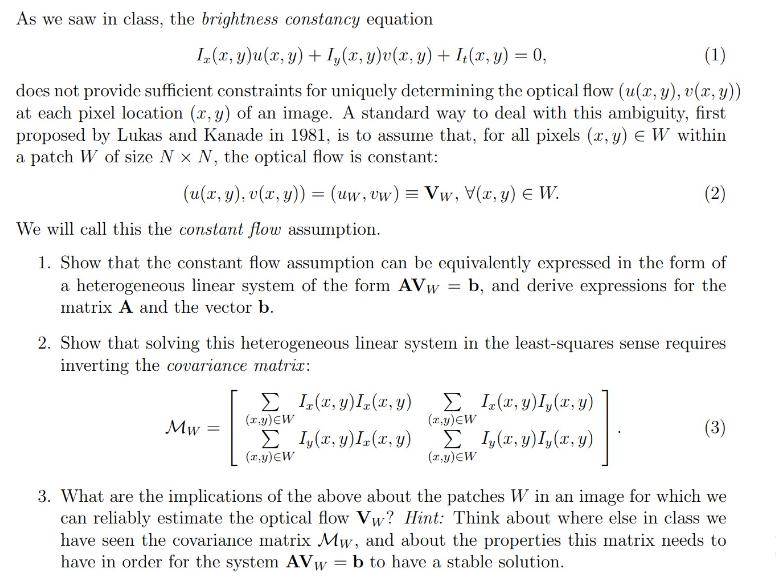
As we saw in class, the brightness constancy equation Iz(x, y)u(x, y) + Iy(x, y)v(x, y) + (x, y) = 0, (1) does not provide sufficient constraints for uniquely determining the optical flow (u(x, y), v(x, y)) at each pixel location (x, y) of an image. A standard way to deal with this ambiguity, first proposed by Lukas and Kanade in 1981, is to assume that, for all pixels (x, y) = W within a patch W of size Nx N, the optical flow is constant: (u(x, y), v(x, y)) = (uw, vw) = Vw, V(x, y) = W. constant flow assumption. We will call this the 1. Show that the constant flow assumption can be equivalently expressed in the form of a heterogeneous linear system of the form AVw = b, and derive expressions for the matrix A and the vector b. 2. Show that solving this heterogeneous linear system in the least-squares sense requires inverting the covariance matrix: Mw = Iz(x, y) Iz(x, y) (x,y) EW Iy(x, y) Iz(x, y) (x,y) EW Iz(x,y),(x, y) (x,y)
Step by Step Solution
3.44 Rating (151 Votes )
There are 3 Steps involved in it
Solution to the Brightness Constancy Equation The brightness constancy equation is an important constraint in computer vision that states that the brightness of a point in an image remains constant ov... View full answer

Get step-by-step solutions from verified subject matter experts