

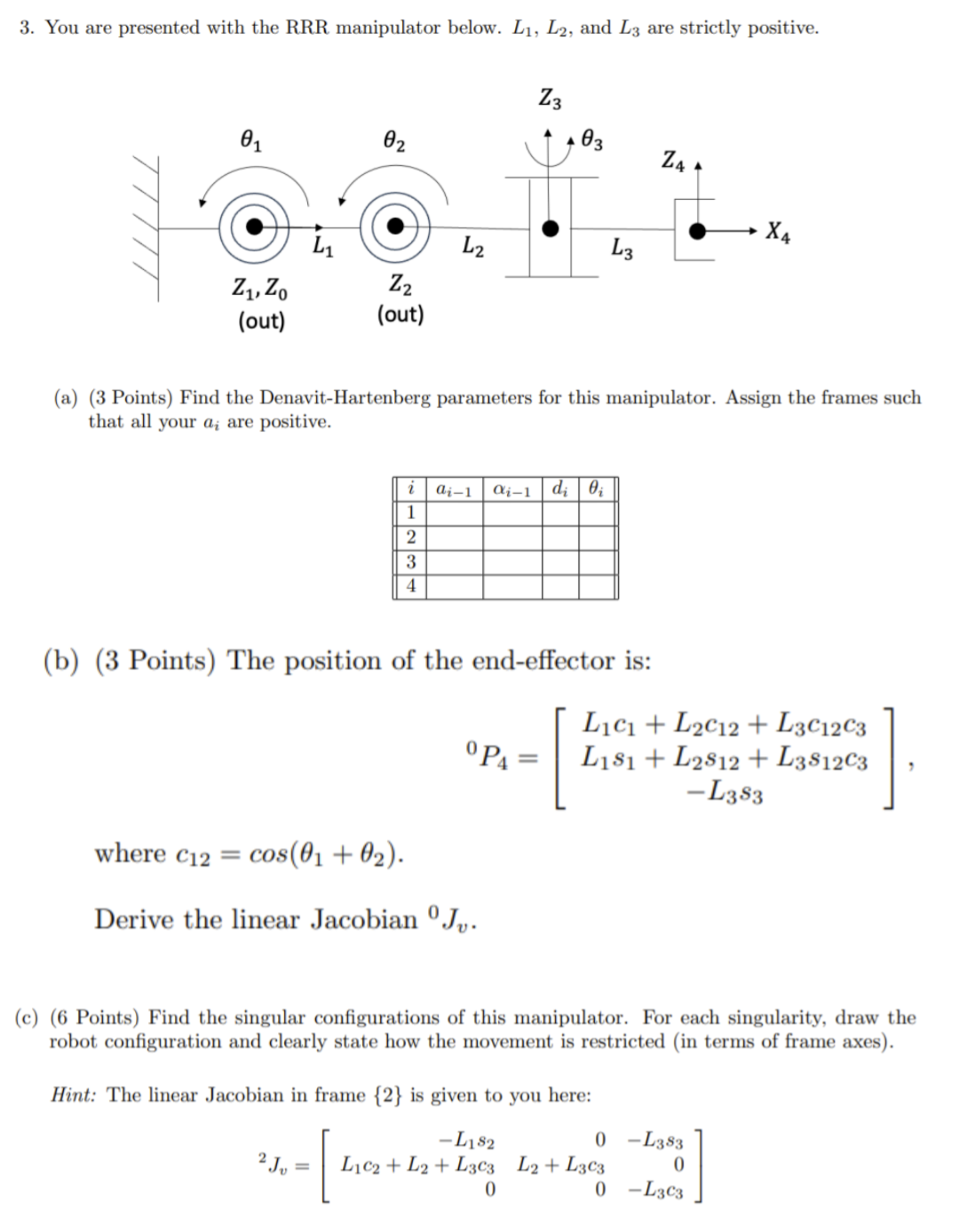
Question: ( c ) ( 6 Points ) Find the singular configurations of this manipulator. For each singularity , draw the robot configuration and clearly state
c Points Find the singular configurations of this manipulator. For each singularity draw the
robot configuration and clearly state how the movement is restricted in terms of frame axes
Hint: The linear Jacobian in frame is given to you here:
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock