

Question: C . Compute the updated occupancy grid maps for the following two consecutive measurements of the robot. ( 1 ) The robot takes an initial
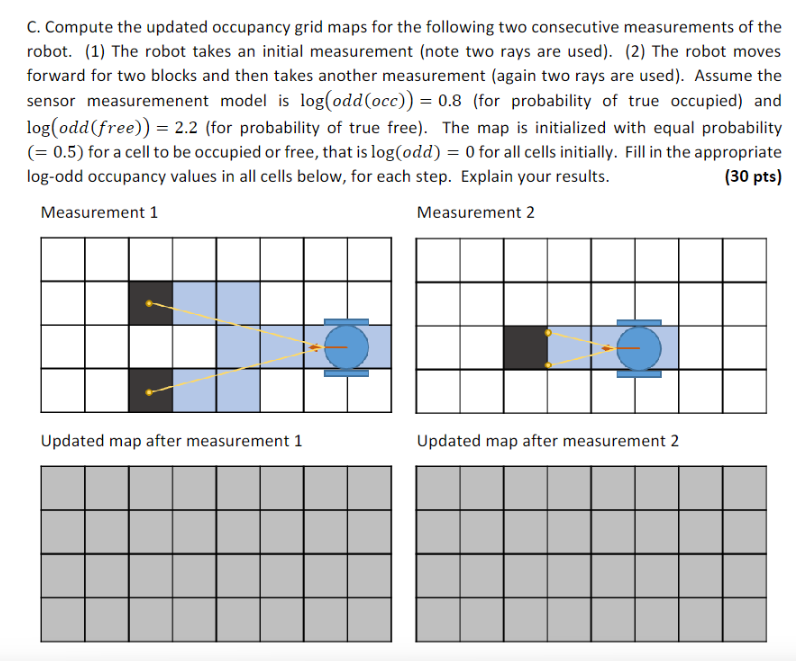
C Compute the updated occupancy grid maps for the following two consecutive measurements of the
robot. The robot takes an initial measurement note two rays are used The robot moves
forward for two blocks and then takes another measurement again two rays are used Assume the
sensor measuremenent model is for probability of true occupied and
odd free
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock