

Question: {c} Propose a design for the gripper and support your proposal with PPT diagrams andforVREP models. {dlExplain what type of sensing capabilities you will need
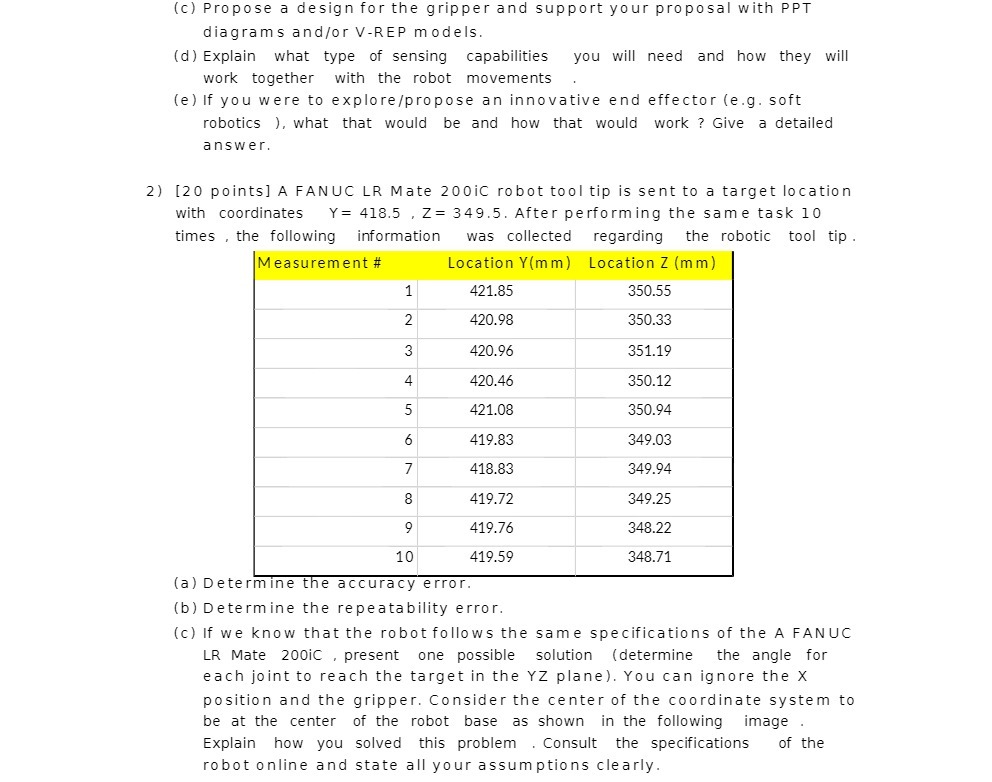
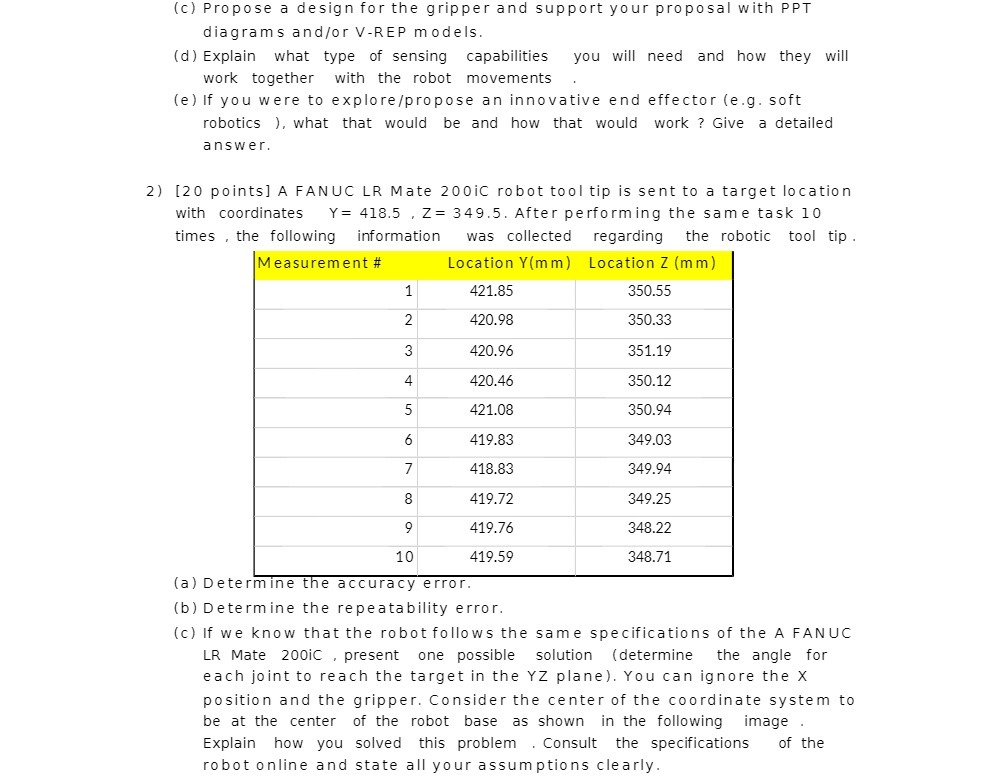
{c} Propose a design for the gripper and support your proposal with PPT diagrams andforVREP models. {dlExplain what type of sensing capabilities you will need and how they will work together with the robot movements lei If you were to explorefpropose an innovative end effector le.g. soft robotics 1. what that would be and how that would work ? Give a detailed answer. 2} [20 points] A FANUC LR Mate 200iC robot tool tip is sent to a target location with coordinates Y: 418.5 .2: 349.5. After performing the same task 10 times .the following information was collected regarding the robotic tool tip. lvleesurement:t Location Ylmm] Location 2 lmml 1 421.35 350.55 2 420.93 350.33 3 ' 420.93 351.19 4 420.43 350.12 5 421.03 350.94 6 419.33 349.03 7 ' 413.33 349.94 3 419.72 349.25 9 I 419.73 343.22 1 0 ' 419.59 343.71 (a) Determine t e accuracy error. lb} Determine the repeatability error. {c} If we know that the robot follows the same specifications of the A FANUC LR Mate 200K: . present one possible solution [determine the angle for each joint to reach the target in the YZ plane). You can ignore the X position and the gripper. Consider the center of the coordinate system to be at the center of the robot base as shown in the following image . Explain how you solved this problem .Consult the specifications of the robot online and state all your assumptions clearly
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts