Question: C++ Which operator need to get in While minuscule 'x' and 'X' mayuscule with no problem This is other question Instruction: Fix the error in
C++ Which operator need to get in While minuscule 'x' and 'X' mayuscule with no problem
This is other question
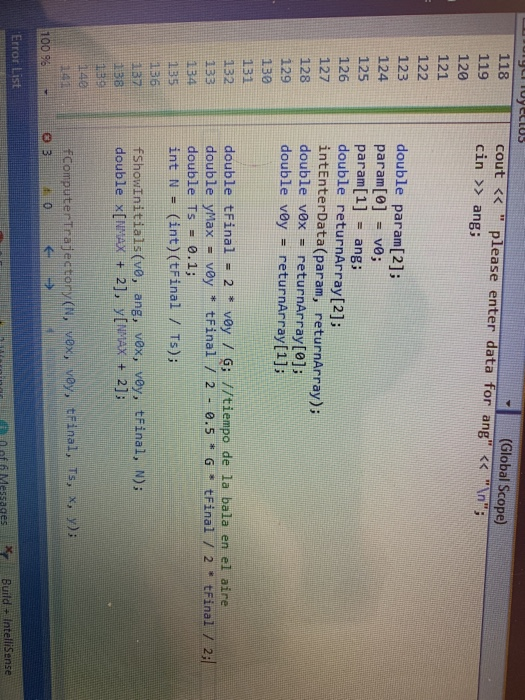
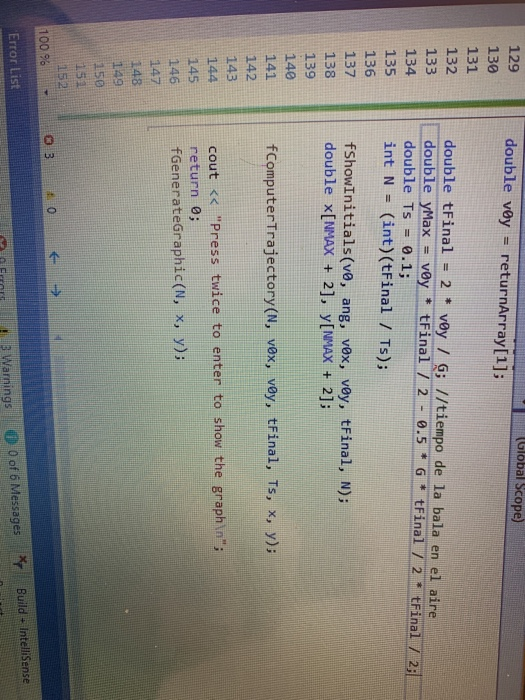
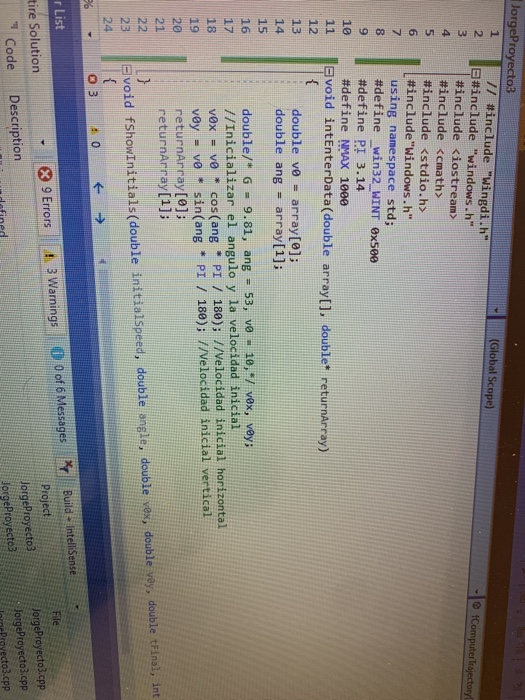
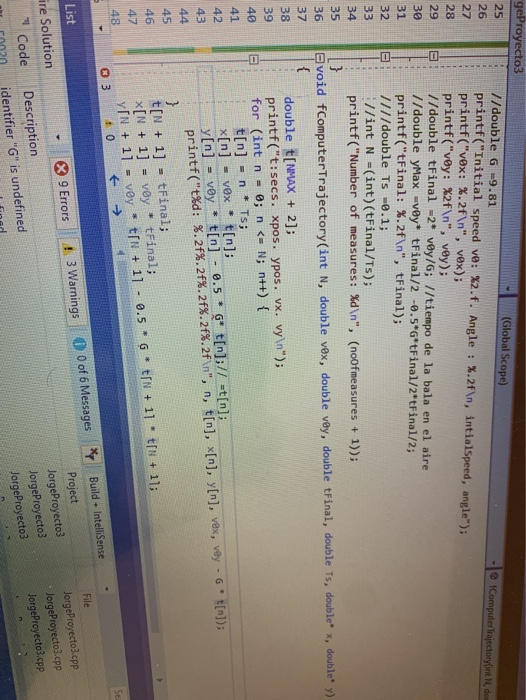
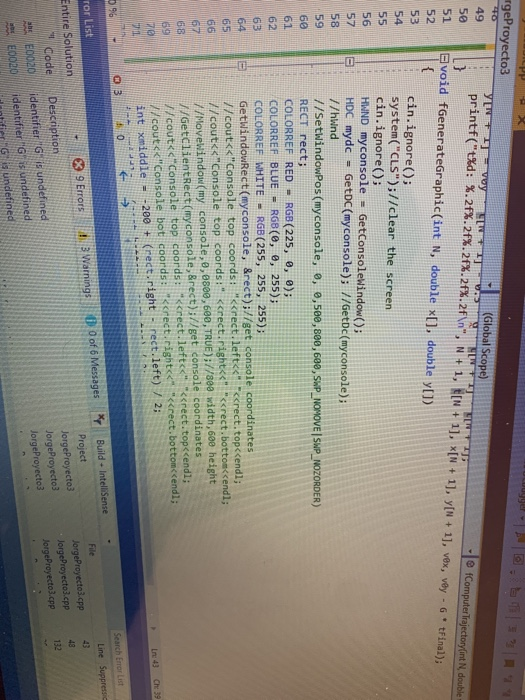
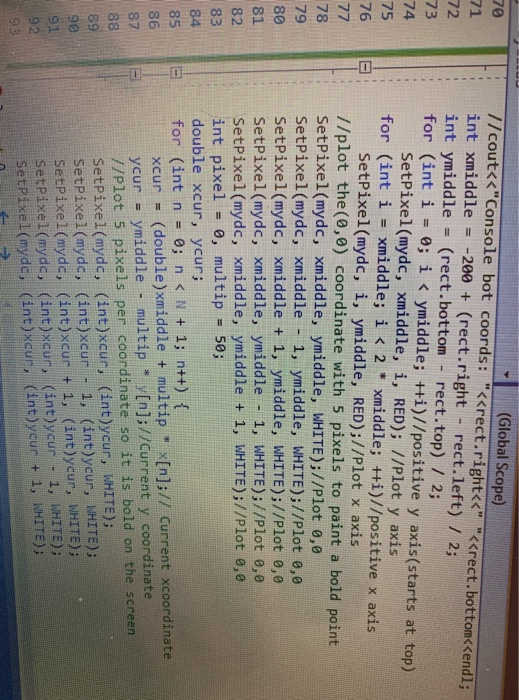
Instruction: Fix the error in the lines,48,132,26,43,44,44,48,49,49,132 and 133
Computer Trajectory JorgeProyecto3 (Global Scope) // #include "Wingdi.h" El#include "windows.h" #include #include #include #include "Windows.h" using namespace std; #define win32_WINT Ox500 #define PI 3.14 #define NMAX 1000 Elvoid intEnterData(double array[], double returnArray) double vo = array[0]; double ang = array[1]; double/" G = 9.81, ang = 53, v@ - 10,-/ vex, voy; //Inicializar el angulo y la velocidad inicial vox - vo * cos(ang - PI / 180); //Velocidad inicial horizontal v@y = ve- sin(ang * PI / 180); //Velocidad inicial vertical returnArray[]} returnArray[1]: void fShowInitials(double initialSpeed, double angle, double vex, double vay, double Final, int - O 3 0 Build - IntelliSense r List 3 Warnings 10 of 6 Messages 9 Errors Project tire Solution Code File Jorge Proyecto3.cpp Jorge Proyecto3.cpp Inne Proyecto3.cpp JorgeProyecto3 JorgeProyecto Description defined geProyecto3 - Computer Irajectory in N, don (Global Scope) //double G -9.81 printf("Initial speed vo: %2.f. Angle : %.2f , intialspeed, angle"); printf("vox: %.2f ", vox); printf("v@y: %2f ", voy); //double tFinal -2* vy/G; //tiempo de la bala en el aire //double yMax -v@y* tFinal/2 -0.5*G*tFinal/2tFinal/2; printf("tFinal: %.2f ", tFinal); ////double Ts =0.1; //int N =(int) (tFinal/Ts); printf("Number of measures: %d ", (noofmeasures + 1)); void fComputerTrajectory(int n, double vex, double vy, double tFinal, double Ts, double" x, doubley) double t[NMAX + 2]; printf("t:secs. xpos. ypos. Vx. vy "); for (int n - @; n VOE ; 100% (Global Scope) cout > ang; Jongerloyecto3 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 double param[2]; param[@] = vo; param[1] = ang; double returnArray[2]; intEnterData(param, returnArray); double vox = returnArray[@]; double voy = returnArray[1]; 133 double tFinal = 2 * voy / G; //tiempo de la bala en el aire double yMax = voy *tFinal / 2 - 0.5 - G tFinal / 2 tFinal 72: double Ts = 0.1; int N = (int) (tFinal / Ts); 134 135 136 fShowInitials (ve, ang, vex, vy, tFinal, N); double x[NMAX + 2], y[IMAX + 2]; 137 138 139 140 f ComputerTrajectory(N, vox, vey, tFinal, Ts, X, Y); 03 04 > 100 96 yeLLUS 19 118 119 120 (Global Scope) cout > ang; double param[2]; param[@] = vO; param[1] = ang; double returnArray[2]; intEnterData(param, returnArray); double vox = returnArray[@]; double voy = returnArray[1]; 129 130 NA mmmmmm double tFinal = 2 * vy / G; //tiempo de la bala en el aire double yMax - voy * tFinal / 2 - 0.5 * G tFinal / 2 - tFinal / 2; double Ts = 0.1; int N = (int) (tFinal / Ts); fShowInitials(ve, ang, vex, voy, tfinal, N); double [NMAX + 2], [NMAX + 2]; 120 , vex, vey, tFinal, Ts, x, y) f ComputerTrajectory 0304 10096 Error List uminor nf Messages Build + IntelliSense (Global Scope) double voy = returnArray[1]; 129 130 131 132 133 134 135 136 137 138 139 140 double tFinal = 2 * vy / G; //tiempo de la bala en el aire double yMax = voy * tFinal / 2 - 0.5 * G * tFinal / 2.tFinal 7 2; double Ts = 0.1; int N = (int)(tFinal / Ts); fShowInitials(vo, ang, vx, voy, tFinal, N); double x[NMAX + 2], y[NMAX + 2]; 141 fComputerTrajectory(N, vx, vy, tFinal, Ts, x, y); cout #include #include #include "Windows.h" using namespace std; #define win32_WINT Ox500 #define PI 3.14 #define NMAX 1000 Elvoid intEnterData(double array[], double returnArray) double vo = array[0]; double ang = array[1]; double/" G = 9.81, ang = 53, v@ - 10,-/ vex, voy; //Inicializar el angulo y la velocidad inicial vox - vo * cos(ang - PI / 180); //Velocidad inicial horizontal v@y = ve- sin(ang * PI / 180); //Velocidad inicial vertical returnArray[]} returnArray[1]: void fShowInitials(double initialSpeed, double angle, double vex, double vay, double Final, int - O 3 0 Build - IntelliSense r List 3 Warnings 10 of 6 Messages 9 Errors Project tire Solution Code File Jorge Proyecto3.cpp Jorge Proyecto3.cpp Inne Proyecto3.cpp JorgeProyecto3 JorgeProyecto Description defined geProyecto3 - Computer Irajectory in N, don (Global Scope) //double G -9.81 printf("Initial speed vo: %2.f. Angle : %.2f , intialspeed, angle"); printf("vox: %.2f ", vox); printf("v@y: %2f ", voy); //double tFinal -2* vy/G; //tiempo de la bala en el aire //double yMax -v@y* tFinal/2 -0.5*G*tFinal/2tFinal/2; printf("tFinal: %.2f ", tFinal); ////double Ts =0.1; //int N =(int) (tFinal/Ts); printf("Number of measures: %d ", (noofmeasures + 1)); void fComputerTrajectory(int n, double vex, double vy, double tFinal, double Ts, double" x, doubley) double t[NMAX + 2]; printf("t:secs. xpos. ypos. Vx. vy "); for (int n - @; n VOE ; 100% (Global Scope) cout > ang; Jongerloyecto3 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 double param[2]; param[@] = vo; param[1] = ang; double returnArray[2]; intEnterData(param, returnArray); double vox = returnArray[@]; double voy = returnArray[1]; 133 double tFinal = 2 * voy / G; //tiempo de la bala en el aire double yMax = voy *tFinal / 2 - 0.5 - G tFinal / 2 tFinal 72: double Ts = 0.1; int N = (int) (tFinal / Ts); 134 135 136 fShowInitials (ve, ang, vex, vy, tFinal, N); double x[NMAX + 2], y[IMAX + 2]; 137 138 139 140 f ComputerTrajectory(N, vox, vey, tFinal, Ts, X, Y); 03 04 > 100 96 yeLLUS 19 118 119 120 (Global Scope) cout > ang; double param[2]; param[@] = vO; param[1] = ang; double returnArray[2]; intEnterData(param, returnArray); double vox = returnArray[@]; double voy = returnArray[1]; 129 130 NA mmmmmm double tFinal = 2 * vy / G; //tiempo de la bala en el aire double yMax - voy * tFinal / 2 - 0.5 * G tFinal / 2 - tFinal / 2; double Ts = 0.1; int N = (int) (tFinal / Ts); fShowInitials(ve, ang, vex, voy, tfinal, N); double [NMAX + 2], [NMAX + 2]; 120 , vex, vey, tFinal, Ts, x, y) f ComputerTrajectory 0304 10096 Error List uminor nf Messages Build + IntelliSense (Global Scope) double voy = returnArray[1]; 129 130 131 132 133 134 135 136 137 138 139 140 double tFinal = 2 * vy / G; //tiempo de la bala en el aire double yMax = voy * tFinal / 2 - 0.5 * G * tFinal / 2.tFinal 7 2; double Ts = 0.1; int N = (int)(tFinal / Ts); fShowInitials(vo, ang, vx, voy, tFinal, N); double x[NMAX + 2], y[NMAX + 2]; 141 fComputerTrajectory(N, vx, vy, tFinal, Ts, x, y); cout


![Ox500 #define PI 3.14 #define NMAX 1000 Elvoid intEnterData(double array[], double returnArray)](https://dsd5zvtm8ll6.cloudfront.net/si.experts.images/questions/2024/09/66f39efb4aaf6_97866f39efa90401.jpg)
![double vo = array[0]; double ang = array[1]; double/" G = 9.81,](https://dsd5zvtm8ll6.cloudfront.net/si.experts.images/questions/2024/09/66f39efc4ca42_97966f39efb99a00.jpg)