

Question: Can somebody change the above given pseudo code and do the basic modifications in python? This is a UCT algorithm Applicable(s) are the moves that
Can somebody change the above given pseudo code and do the basic modifications in python?
This is a UCT algorithm
Applicable(s) are the moves that s can take.
this UCt is called as many times in main to find the optimal cost.
So, can someone wite this function and main in python
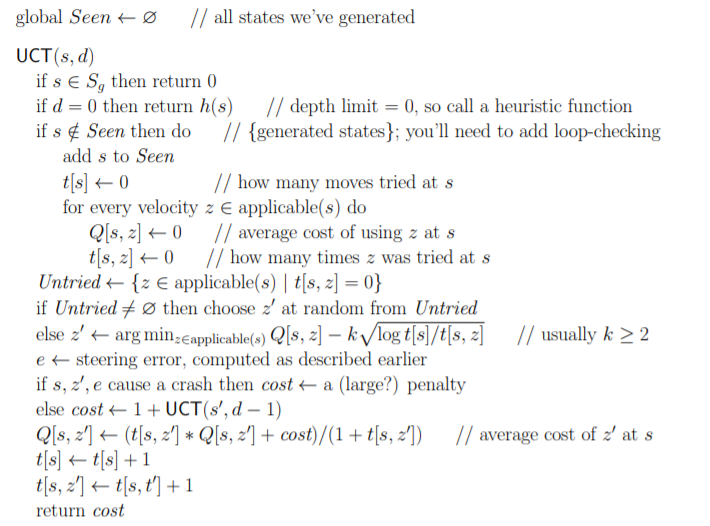
global Seen+0 / all states we've generated UCT (s, d) if s E Sa then return 0 if d = 0 then return h(s) // depth limit 0, so call a heuristic function if s f Seen then do generated states; you'll need to add loop-checking add sto Seen how many moves tried at s for every velocity z E applicable(s) do average cost of using z at s ts, 20 //how many times z was tried at s Untried {2E applicable(s) | t[s,2-0} if Untried then choose, at ran(lom from Untried else z' arg min, Eapplicable(a) Q[s, -klogt[s ts, usually k2 2 e steering error, computed as described earlier if s, ',e cause a crash then costa large?) penalty else cost 1 + UCT(s', d-1) Qls,21 (t[8,21 * Qls, + cost)/( 1 + t [s, ) // average cost of z' at s t[s] t[s] + 1 return cost global Seen+0 / all states we've generated UCT (s, d) if s E Sa then return 0 if d = 0 then return h(s) // depth limit 0, so call a heuristic function if s f Seen then do generated states; you'll need to add loop-checking add sto Seen how many moves tried at s for every velocity z E applicable(s) do average cost of using z at s ts, 20 //how many times z was tried at s Untried {2E applicable(s) | t[s,2-0} if Untried then choose, at ran(lom from Untried else z' arg min, Eapplicable(a) Q[s, -klogt[s ts, usually k2 2 e steering error, computed as described earlier if s, ',e cause a crash then costa large?) penalty else cost 1 + UCT(s', d-1) Qls,21 (t[8,21 * Qls, + cost)/( 1 + t [s, ) // average cost of z' at s t[s] t[s] + 1 return cost
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts