

Question: Can you help me implement this model in simulink with all the steps? The Problem A mobile robot ( equipped with wheels ) is pushing
Can you help me implement this model in simulink with all the steps? The Problem
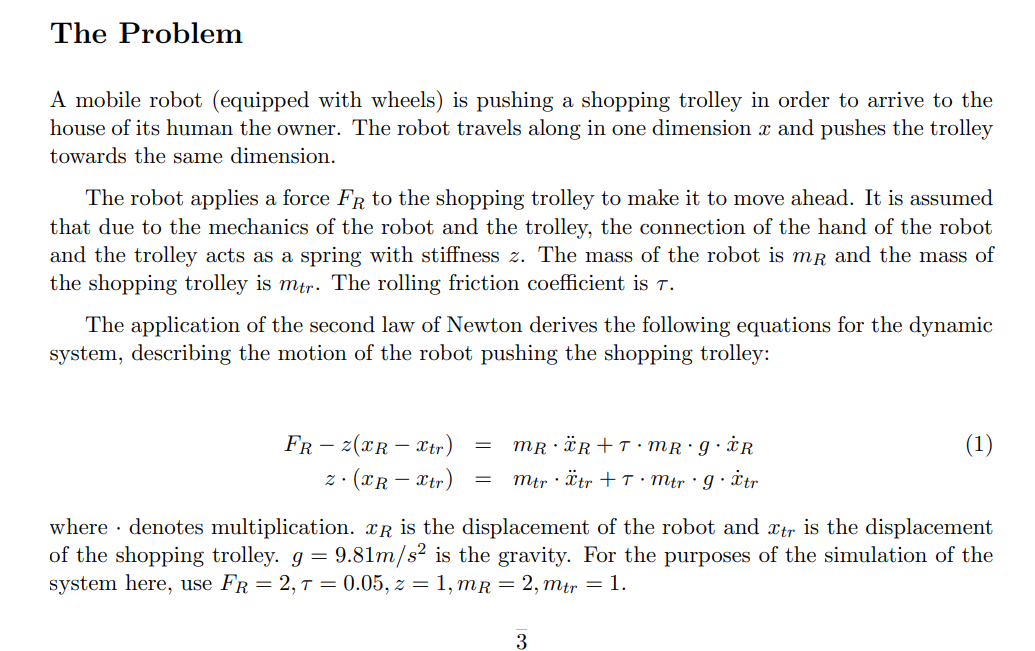
A mobile robot equipped with wheels is pushing a shopping trolley in order to arrive to the
house of its human the owner. The robot travels along in one dimension and pushes the trolley
towards the same dimension.
The robot applies a force to the shopping trolley to make it to move ahead. It is assumed
that due to the mechanics of the robot and the trolley, the connection of the hand of the robot
and the trolley acts as a spring with stiffness The mass of the robot is and the mass of
the shopping trolley is The rolling friction coefficient is
The application of the second law of Newton derives the following equations for the dynamic
system, describing the motion of the robot pushing the shopping trolley:
where denotes multiplication. is the displacement of the robot and is the displacement
of the shopping trolley. is the gravity. For the purposes of the simulation of the
system here, use
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock