

Question: CLO - 2 , PLO - 3 , C - 2 3 . Given the world coordinates for the TRL:R robot in Figure 2 as
CLO PLO C
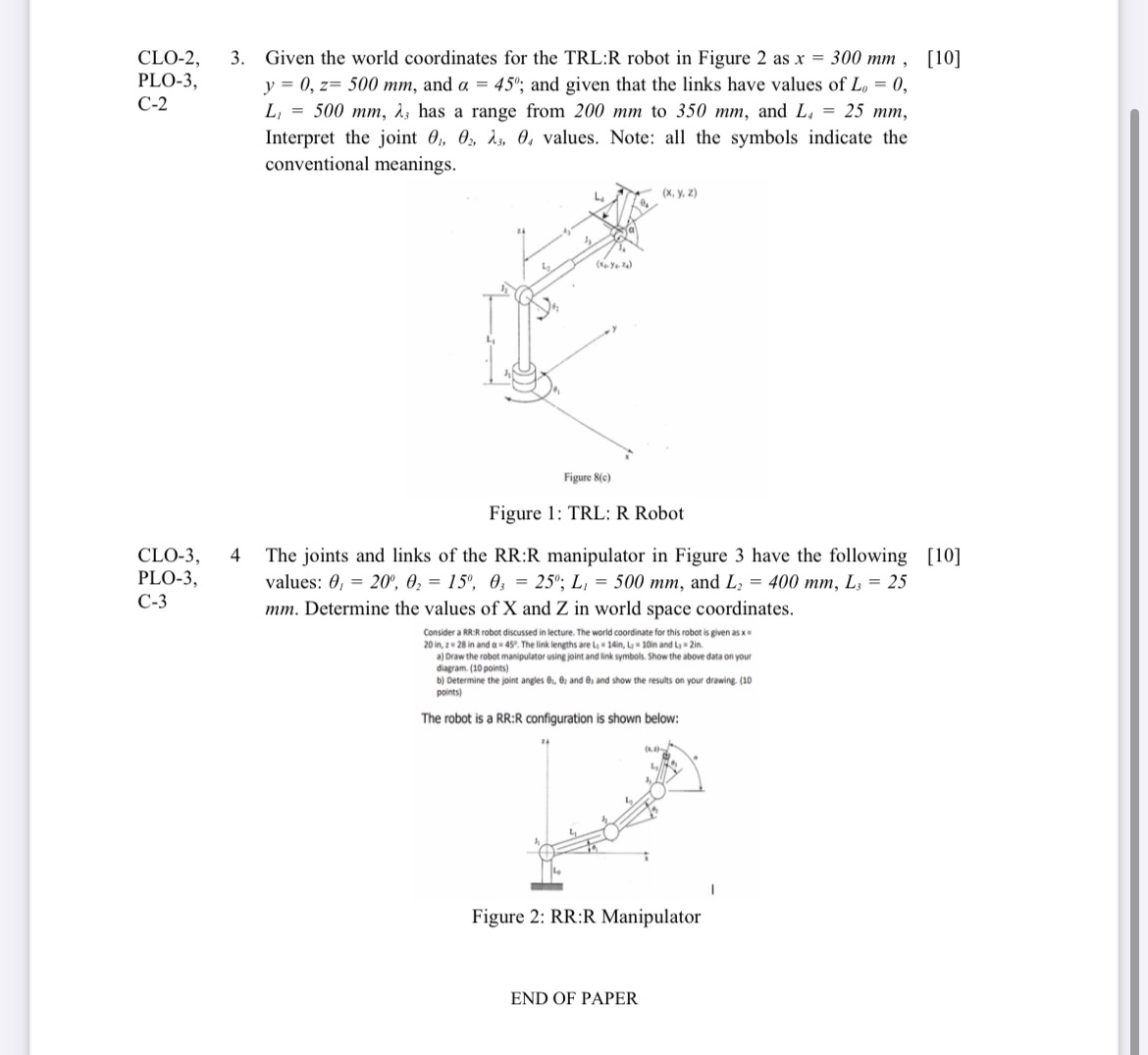
Given the world coordinates for the TRL:R robot in Figure as and ; and given that the links have values of has a range from mm to mm and Interpret the joint values. Note: all the symbols indicate the conventional mear:
CLO The joints and links of the RR:R manipulator in Figure have the following PLO values: ; and C mm Determine the values of X and Z in world space coordinates.The robot is
Figure : RR:R Manipulator
END OF PAPERPlease solve this question.
Course: Robot and Computer Controlled Machine
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock