

Question: Coding by Python Just tell me what type of code(like while loop or anything else). Description: A code designed to interact with a virtual simulation
Coding by Python
Just tell me what type of code(like while loop or anything else).
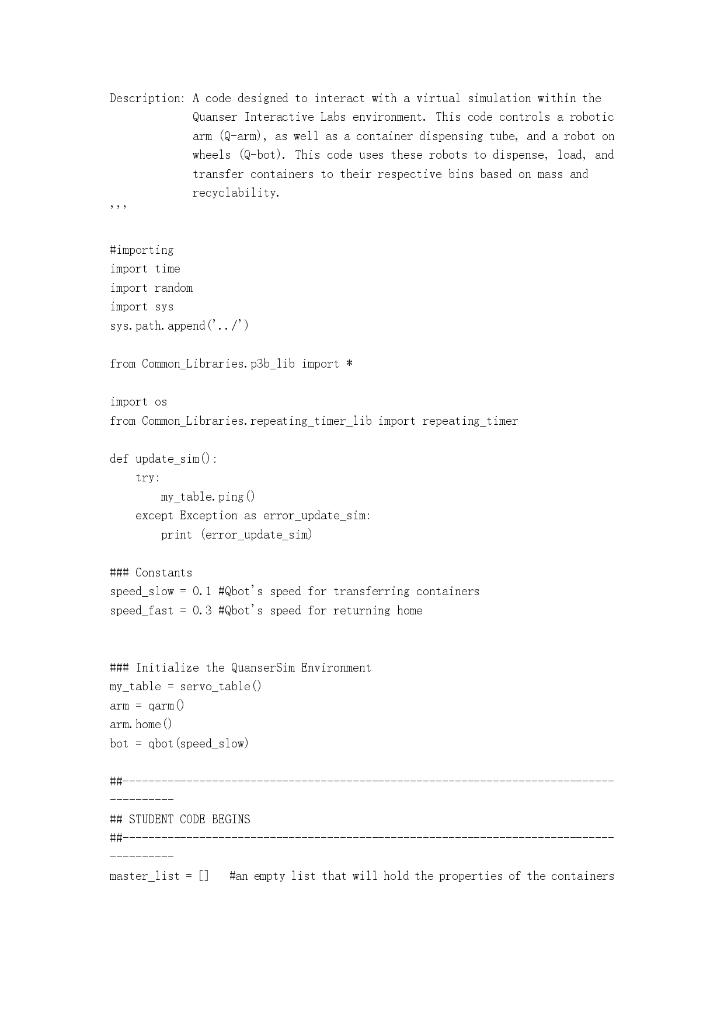
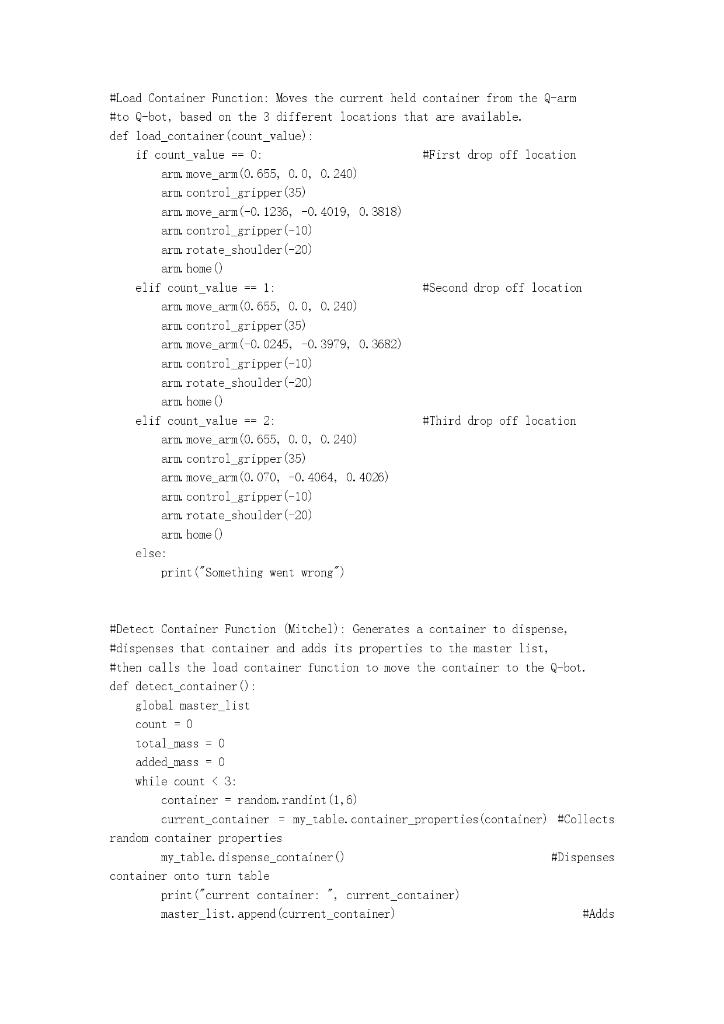
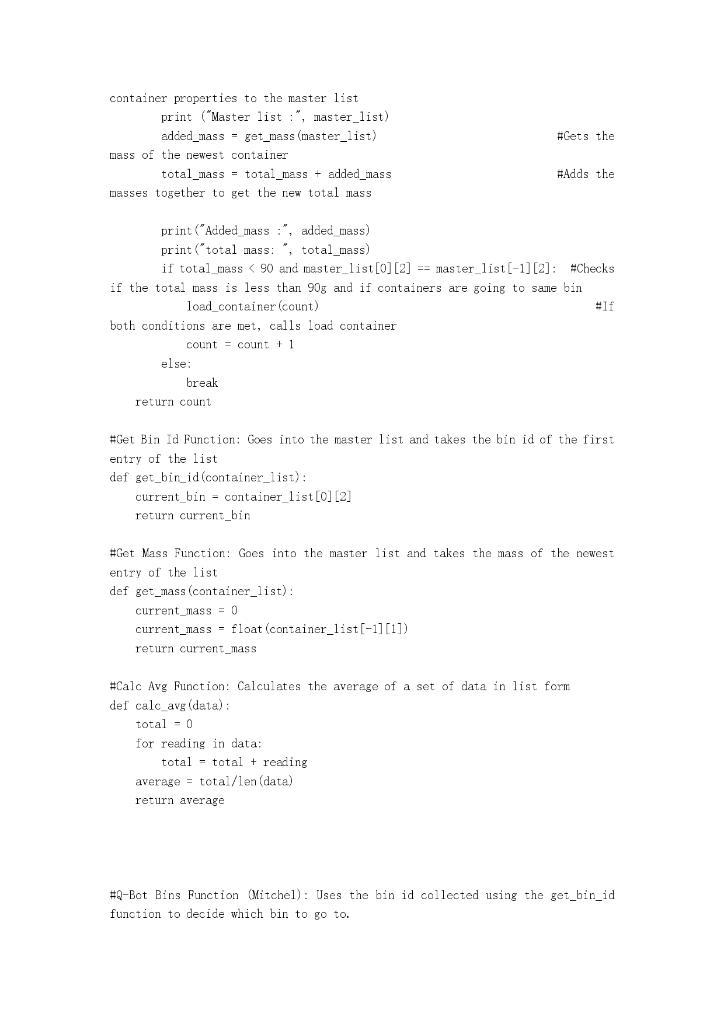
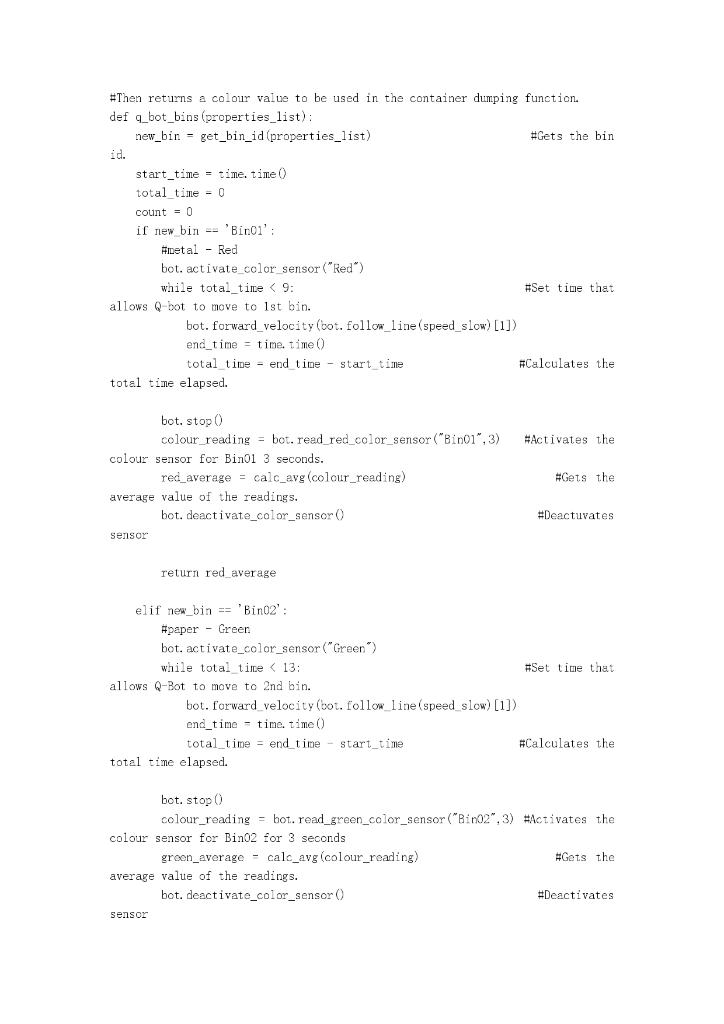
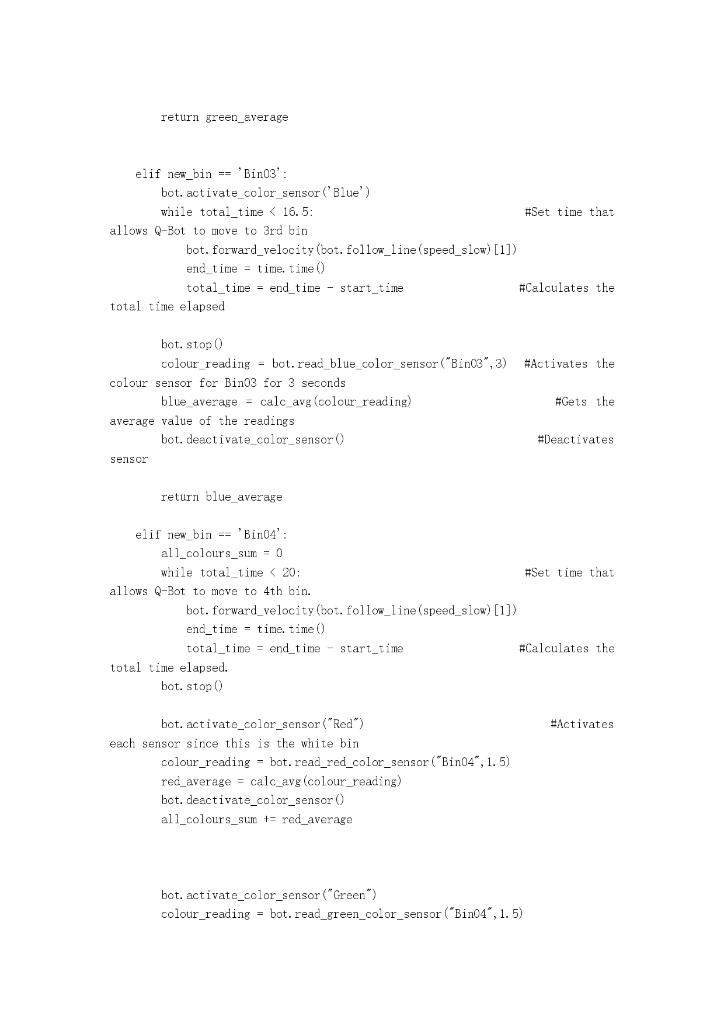
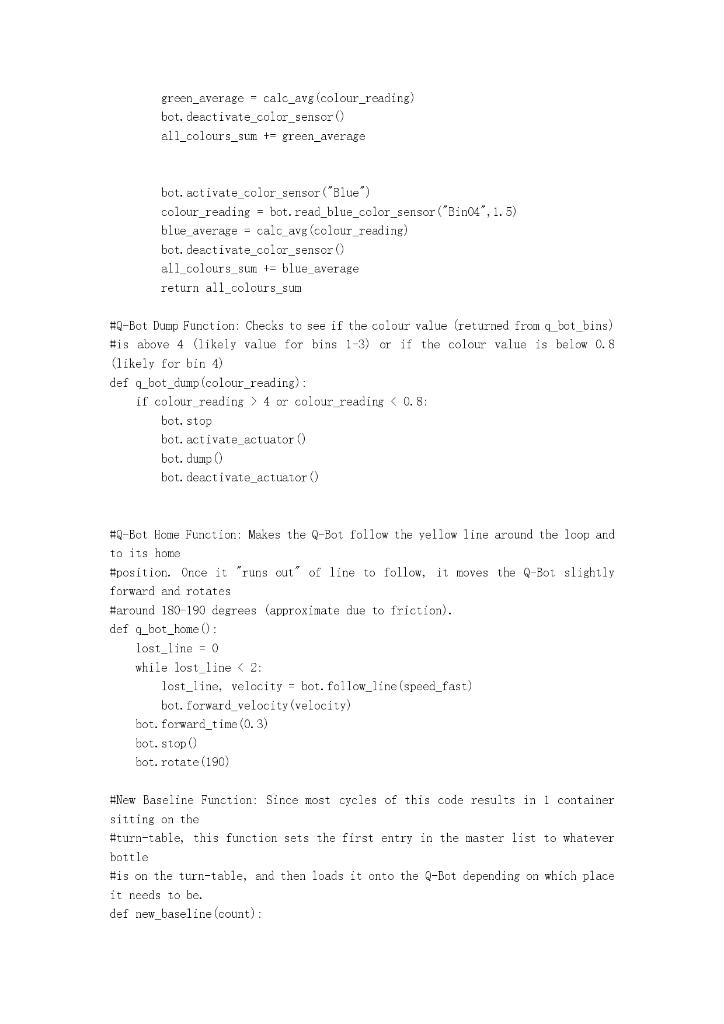
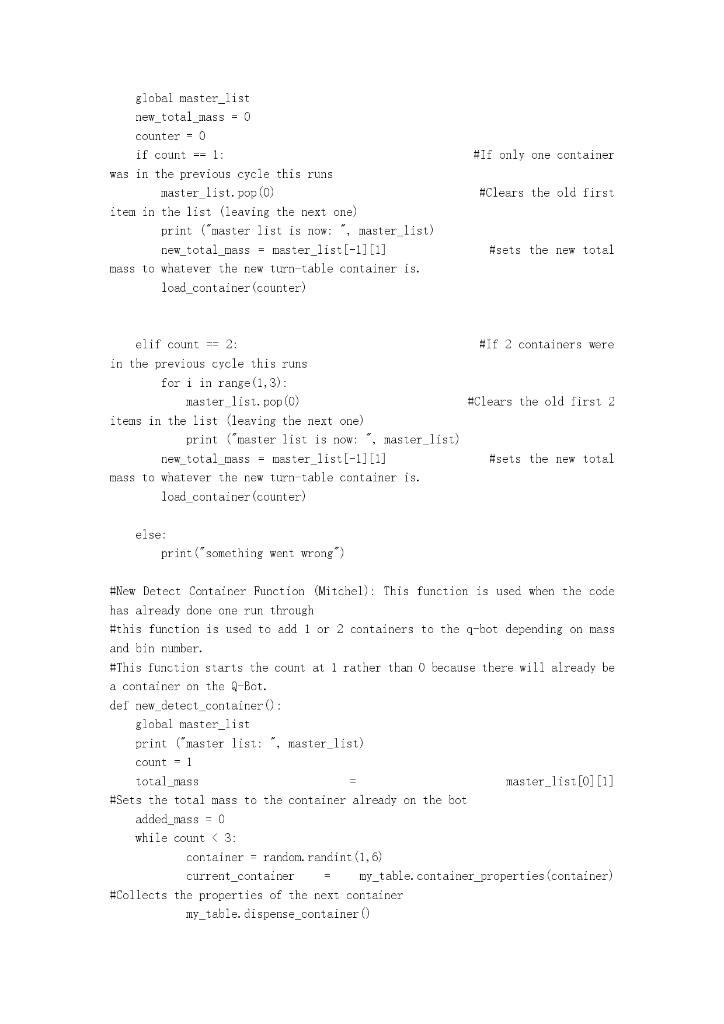
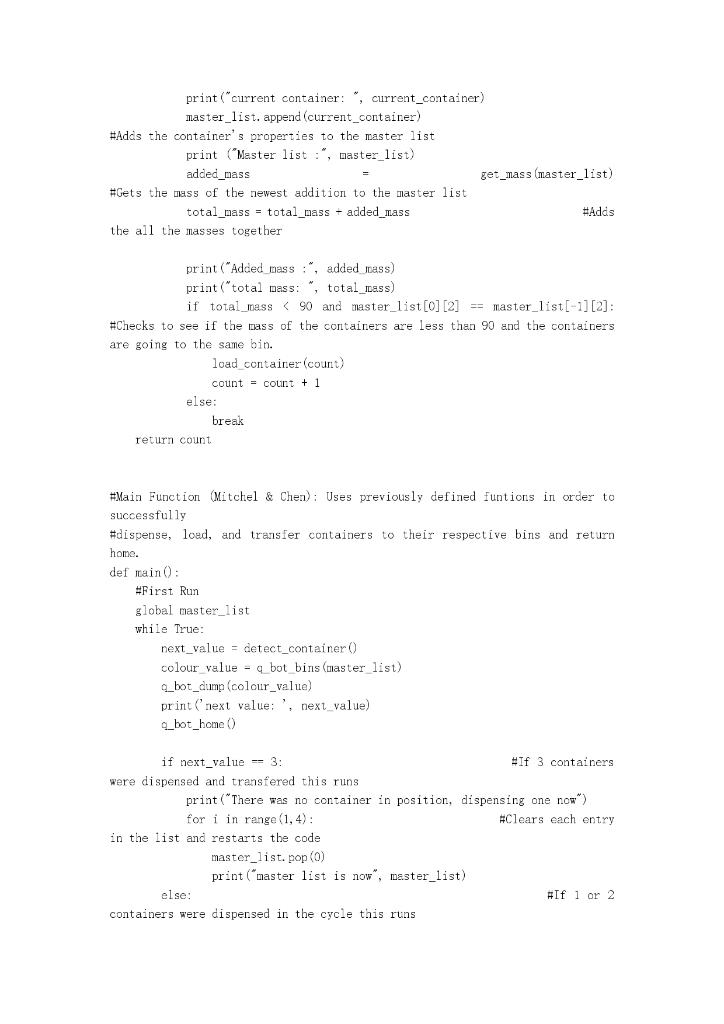
Description: A code designed to interact with a virtual simulation within the Quanser Interactive Labs environment. This code controls a robotic arm (Q-arm), as well as a container dispensing tube, and a robot on wheels Q-bot). This code uses these robots to dispense, load, and transfer containers to their respective bins based on mass and recyclability. #irporting import time import random import sys sys. path. append('../ from Connor Libraries. p3b lib icport * Import os from Cormon. Libraries. repeating_timer_lib import repeating_timer def update si: try my_table. ping 0 except Exception as error_update_sim: print (error update sim ### Constants speed_slow = 0.1 #Qbot's speed for transferring containers speed_fast = 0.3 #Qbot's speed for returning home ### Initialize the QuanserSic Environment my_table = servc_table) ar = garn arm home bot = qbot (speed_slow) ## ## STUDENT CODE BEGINS ## master_list = [] #an empty list that will hold the properties of the containers #Load Container Function: Moves the current held container from the Q-arm #to G-bot, based on the 3 different locations that are available. def load_container (count_value): if count_value == 0: #First drop off location arm. move_arm (0.655, 0.0, 0.240) art. control gripper (35) arm. move_arm (-0. 1236,-0.4019, 0.3818) arti control gripper (-10) aru, rotate_shoulder(-20) art bome 0 elif count_value == 1: #Second drop off location arth move_arm (0.655, 0.0, 0.240) arol control gripper (35) arm move_arm (-0.0245, 0.3979, 0.3682) arth control gripper(-10) arm. rotate_shoulder(-20) art bome elif count value == 2: #Third drop off location art move_arm(0.655, 0.0, 0.240) ari control_gripper (35) arn move_arm (0.070, 0.4064, 0.4026) arul control gripper (-10) arm rotate_shoulder(-20) art bome 0 else: print("Something went wrong) #Detect Container Function (Mitchel): Generates a container to dispense, #dispenses that container and adds its properties to the master list, #then calls the load container function to move the container to the Q-bot. def detect_container): global master list count - 0 total mass = 0 added_mass-0 while count 4 or colour reading 4 or colour reading
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts