

Question: complementary slackness Consider the normal-form primal LP Primal: min w = c x (Objective Function) s.t. Ax 2 b x 2 0 (Constraints #1 through
complementary slackness
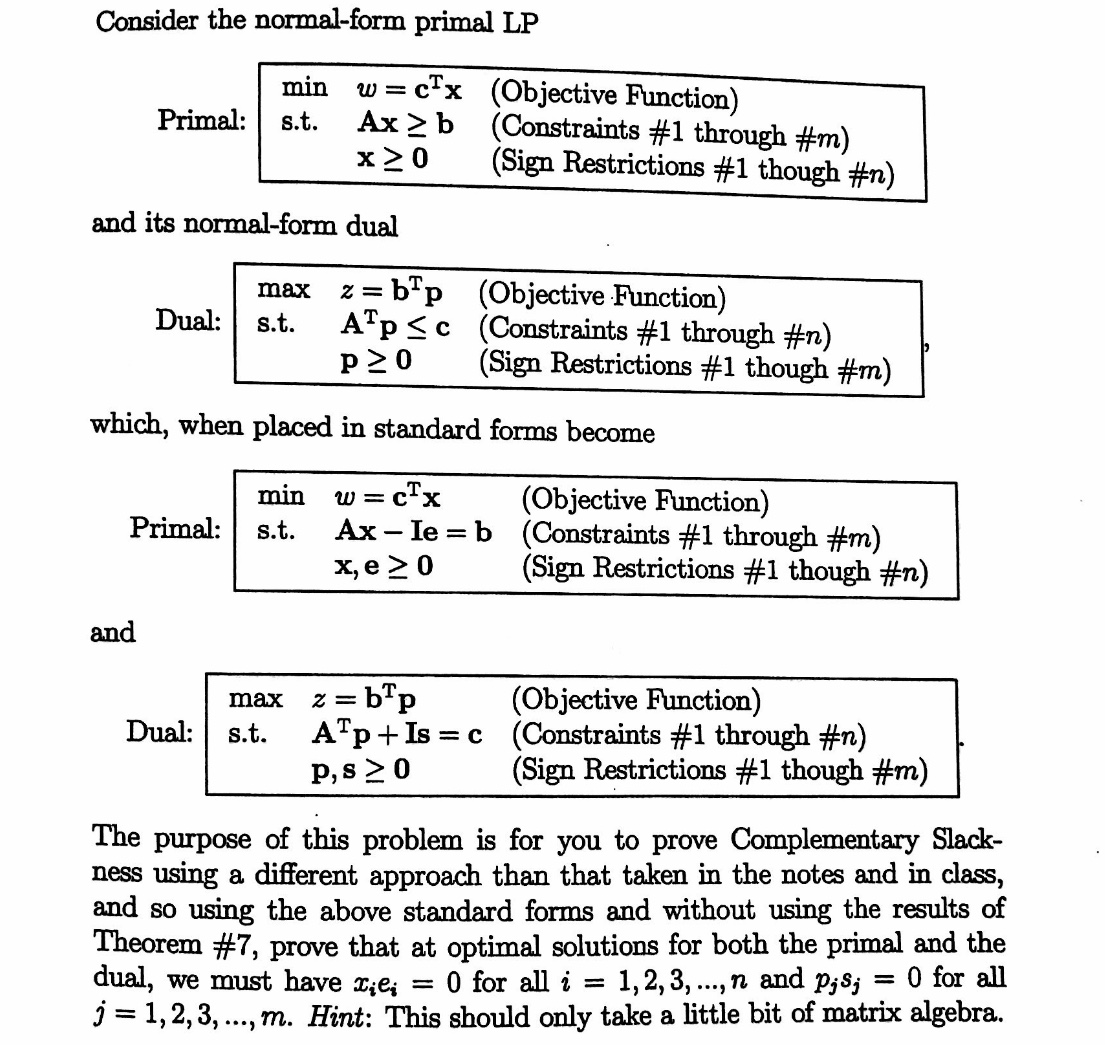
Consider the normal-form primal LP Primal: min w = c x (Objective Function) s.t. Ax 2 b x 2 0 (Constraints #1 through #m) (Sign Restrictions #1 though #n) and its normal-form dual max Dual: 2=bp (Objective Function) s.t. ATp _ c (Constraints #1 through #n) P20 (Sign Restrictions #1 though #m) which, when placed in standard forms become min w =clx (Objective Function) Primal: s.t. Ax - Ie = b (Constraints #1 through #m) X, e 2 0 (Sign Restrictions #1 though #n) and max z = bp (Objective Function) Dual: s.t. ATp + Is =c (Constraints #1 through #n) P, $ 20 (Sign Restrictions #1 though #m) The purpose of this problem is for you to prove Complementary Slack- ness using a different approach than that taken in the notes and in class, and so using the above standard forms and without using the results of Theorem #7, prove that at optimal solutions for both the primal and the dual, we must have re; = 0 for all i = 1, 2, 3, ..., n and p;s; = 0 for all j = 1, 2, 3, ..., m. Hint: This should only take a little bit of matrix algebra
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts