

Question: Computing Steady - State Gains Consider the model of the cruise controlled vehicle we have been working with m y + a y = E
Computing SteadyState Gains
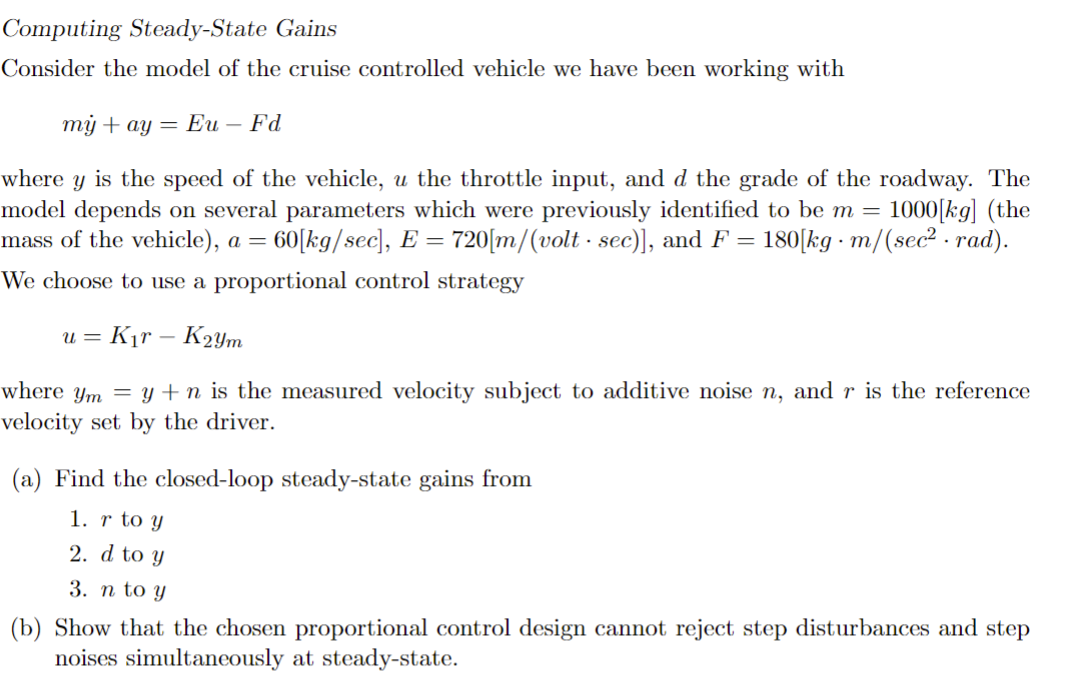
Consider the model of the cruise controlled vehicle we have been working with
where is the speed of the vehicle, the throttle input, and the grade of the roadway. The
model depends on several parameters which were previously identified to be the
mass of the vehicle and
We choose to use a proportional control strategy
where is the measured velocity subject to additive noise and is the reference
velocity set by the driver.
a Find the closedloop steadystate gains from
to
to
to
b Show that the chosen proportional control design cannot reject step disturbances and step
noises simultaneously at steadystate.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock