

Question: Consider a 2-dimensional discrete-time system described by the following equations: Axk + wk, Xk+1 = Zk = Cxk + Vk, u1, k [1,k =
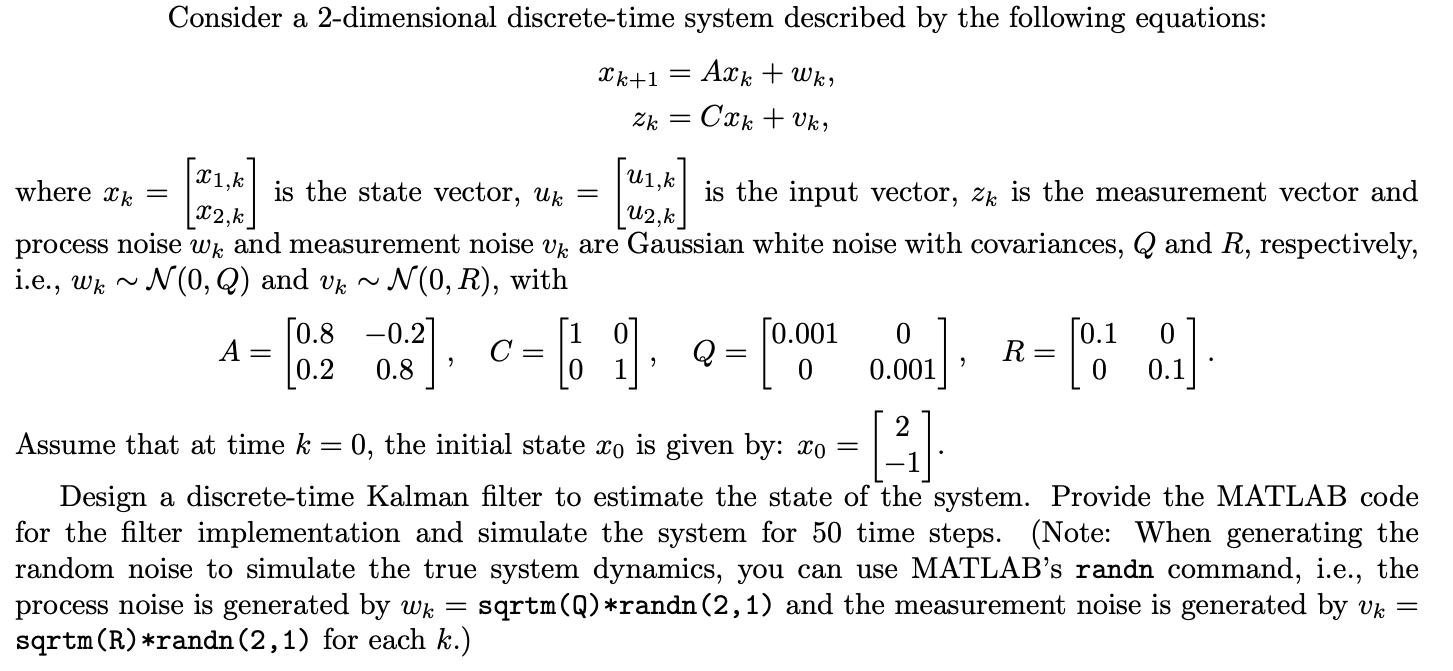
Consider a 2-dimensional discrete-time system described by the following equations: Axk + wk, Xk+1 = Zk = Cxk + Vk, u1, k [1,k = where k is the input vector, zk is the measurement vector and [X2,k] U2, k process noise wk and measurement noise vk are Gaussian white noise with covariances, Q and R, respectively, i.e., wk~. N(0, Q) and Uk ~ N(0, R), with is the state vector, uk [0.8 -0.2] = 0.2 0.8 A = = 1 c = [69] C Q [0.001 0.001], [0.1 0 R = 0 0.1 2 Assume that at time k = 0, the initial state co is given by: xo = [3] Design a discrete-time Kalman filter to estimate the state of the system. Provide the MATLAB code for the filter implementation and simulate the system for 50 time steps. (Note: When generating the random noise to simulate the true system dynamics, you can use MATLAB's randn command, i.e., the process noise is generated by wk sqrtm(Q)*randn (2,1) and the measurement noise is generated by Uk = sqrtm (R) *randn (2,1) for each k.) =
Step by Step Solution
3.41 Rating (151 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts